





 Рейтинг: 4.9/5.0 (1846 проголосовавших)
Рейтинг: 4.9/5.0 (1846 проголосовавших)Категория: Инструкции
Практически каждый ребенок (а часто и взрослый) мечтает собрать собственного робота. Для таких целей лучше всего подойдет конструктор Лего. В различных наборах представлено множество элементов, благодаря которым можно сделать не только обычную статичную модель робота, но и настоящего программируемого «монстра». Конечно, такие наборы стоят не дешево, но устройства, создаваемые с их помощью, действительно впечатляют.
Как сделать робота из обычного конструктора Лего?Если вы хотите собрать обычную модель робота, которая не будет выполнять какие-либо функции, тогда вам потребуется любой из конструкторов Лего, в котором найдется достаточно много различных строительных кубиков и прямоугольников различной длины.
Сборка роботов Лего: После этого с каждой стороны необходимо присоединить по 2 кубика вниз на выступающие сегменты «плеч»;
После этого с каждой стороны необходимо присоединить по 2 кубика вниз на выступающие сегменты «плеч»;Также можно присоединить к роботу различные секции и фрагменты конструктора, чтобы разнообразить его внешний вид.
Программируемый робот из Лего MindstormsЧтобы создать робота, который сможет самостоятельно двигаться, преодолевать  препятствия и реагировать на внешние раздражители, вам потребуется специальный набор Лего Mindstorms NXT (либо более новая модель). В зависимости от комплектации в него входит несколько небольших моторов, один мощный мотор, 6 и более соединительных кабелей, программируемый модуль с батареей и внешними интерфейсами и т. д. Конечно, чтобы собрать такого робота, потребуется некоторое время и немного усидчивости, но сложностей с процессом сборки и запуска возникнуть не должно. Кроме того, подобные наборы позволяют собирать автомобили по разным схемам.
препятствия и реагировать на внешние раздражители, вам потребуется специальный набор Лего Mindstorms NXT (либо более новая модель). В зависимости от комплектации в него входит несколько небольших моторов, один мощный мотор, 6 и более соединительных кабелей, программируемый модуль с батареей и внешними интерфейсами и т. д. Конечно, чтобы собрать такого робота, потребуется некоторое время и немного усидчивости, но сложностей с процессом сборки и запуска возникнуть не должно. Кроме того, подобные наборы позволяют собирать автомобили по разным схемам.
 сервомотора;
сервомотора; системой управления NXT (он является «мозгом» и батареей робота).
системой управления NXT (он является «мозгом» и батареей робота).Таким же способом можно сделать танк из Лего или собрать более сложного робота, имеющего значительно большее количество функций.
 Ещё больше интересного
Ещё больше интересного



















February 25, 2014
Кто ещё не знаком с конструктором "Лего"? Наверное, уже не найти такого человека. Конструктор совсем недавно вошёл в нашу жизнь и навсегда завоевал любовь и интерес. Недаром в деталях "Лего" предусмотрено столько вариантов фигур, что полёт фантазии не имеет границ. Это просто неоценимо для развития мышления и моторики детей. Да и взрослые не откажутся повозиться с конструктором.

Собирать различные предметы из конструктора - хорошее занятие для всей семьи. Фантазия детей не знает пределов, головки маленьких выдумщиков всегда полны новых идей. Многие мальчишки собирают из конструктора фигурки любимых героев мультфильмов, трансформеров, и такая проблема, как сделать робота из "Лего", для них не является трудной.

Возникли целые группы, сообщества, проводятся выставки и соревнования. Конечно же, роботы из "Лего" могут быть самыми разнообразными, причём не только по форме. Как известно, фирма, выпускающая конструкторы "Лего", включила в комплекцию деталей разнообразные блоки управления, моторчики, с помощью которых можно делать шагающего человечка-робота, выполняющего определённые действия, а запускается все это с помощью специальных и несложных компьютерных программ.
Идеи для роботаСуществуют даже школы, обучающие тому, как сделать робота. Из "Лего" строить и собирать научат даже самого маленького ученика. Компанией предусмотрены пакеты деталей по сборке настоящих роботов. Мы можем видеть самые разнообразные планки, штанги, оси, электронные датчики и моторчики, а также другие составляющие конструктора.
А сердцем всего конструктора-робота является особое устройство под названием "кирпич". Это процессор будущего робота. Если говорить образно, то его мощность подобна процессору смартфона. Звучит довольно впечатляюще, не правда ли?
В чём заключается работа процессора? На входных разъёмах идёт считывание информации с разных датчиков. Это может быть датчик движения, цвета, например, расстояния или гироскопа. А на выходе отдаются соответствующие команды относительно скорости или мощности движения. На самой коробочке находится экран и несколько кнопок для регулировки действий.

Если вы твёрдо настроены создать робота, выполняющего определённые действия и движения, надо выбрать специализированный набор конструктора с конкретными деталями и двигателями для этой игрушки. Именно в таком наборе и будет находиться "кирпич". В инструкции по сборке пошагово расписаны все действия относительно того, как сделать робота из "Лего".
Для более удобного ознакомления следует установить лэптоп для просмотра роликов по обучению и программированию. Сама среда программирования достаточно понятна и создана для быстрой сборки блок-системы.
Операторы имеют вид квадратов разных цветов - можно задавать необходимые параметры будущего робота, соединяя между собой квадратики, создавая особую систему. И при нажатии всего лишь одной кнопки через USB передаются заданные параметры. Если вы не представляете образно, как сделать робота из "Лего", тогда сначала попробуйте это на компьютере. Создавая специальную программу по работе робота, сделайте его прототип и, поработав с операторами программы, отрегулируйте возможные неточности и недочёты.
Джиробой - базовый робот для новичковОдним из более популярных роботов "Лего" является Джиробой. Его широко рекламируют в видеороликах на "Ютубе", и готовая модель представлена в офисе компании, продающей конструкторы "Лего". Это базовый вариант, который подойдёт для начинающих сборщиков роботов. На ногах Джиробоя, параллельно друг другу, расположены колёса. Благодаря действию гироскопа робот устойчиво держится на них, даже если его толкнуть - он не упадёт.
Благодаря действию установленных датчиков робот регулирует своё движение. Достаточно показать цветную пластину, и он, согласно установленной программе, будет двигаться в определённом порядке. Например, зелёная пластинка сигнализирует движение вперёд, красная – стоять, а вот жёлтая и синяя поворачивают его в разные стороны. Проще не бывает.

Для начала надо создать основу конструкции. О том, как сделать из "Лего" робота, подробно расписано в инструкции. Нельзя уклоняться от неё и действовать на своё усмотрение и вкус - можно совершить массу ошибок и в итоге забросить конструктор на дальние полки антресолей.
Начинаем собирать тело робота, а потом просто загружаем соответствующую программу для работы датчиков. На первый взгляд ничего проще не может быть. Но в тексте инструкции 120 шагов, которые должны быть выполнены точно. Без терпения и усидчивости не обойтись, собирая конструкции "Лего". Как сделать маленького робота? Следует обострить своё внимание и наблюдательность, поскольку сотни мельчайших деталей способны привести в замешательство.
Инвестиция времени в развитие детейНе стоит бояться мелких вещей и жалеть своё время, поскольку вы инвестируете потраченные на сборку часы в общение с ребёнком и его развитие. Это неоценимый вклад в будущее детей. Такие конструкторы отлично развивают мышление, логику, усидчивость и терпение. Если ребёнок предложит вам сделать робота из "Лего", смело беритесь за дело и погружайтесь в интереснейший мир трансформеров.
Роботы в нашей жизни – это уже не фантастика, а реальность! Они используются во всех сферах деятельности человека: транспорте, хирургии, военной промышленности, освоении космоса… Служат людям, выполняя определенные задачи. А чтобы управлять электронными машинами, необходимо пользователям обладать специальными знаниями. Именно поэтому, удовлетворяя такую потребность, в образовательных учреждениях разрабатываются и предлагаются учащимся курсы роботостроения, где они учатся самостоятельно создавать и программировать электронные механизмы. Робототехника развивает творческие способности детей, учит их самостоятельно мыслить, приобщает к науке.
Для создания робота своими руками необходим конструктор Lego MindStorms NXT. В нем заложены новейшие технологии робототехники. Такие наборы сейчас поступают в российские школы по линии ФГОС. На их основе дети собирают различные конструкции роботов с нуля, используя свою фантазию и творческие идеи.
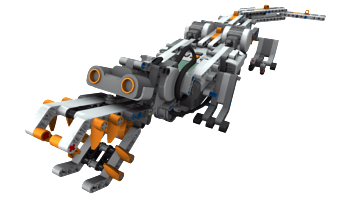
Создаем вездеход
Начинаем с отбора необходимых для создания автоматизированного гусеничного вездехода с дистанционным управлением детали. Кстати, они почти такие же, как в лего-конструкторах, которые родители покупают детям дома.

1 этап Сборка гусениц.

Берем 3 средних прямоугольных детали и еще 3 чуть поменьше, соединяем их. С помощью «шпилек» присоединяем 2 диска и натягиваем резиновую гусеницу.


В том же порядке собираем вторую гусеницу.
2 этап. Сборка привода.

Из трех шестеренок разного размера собираем шестереночную передачу.

Затем присоединяем ее к интерактивному сервомотору, гарантирующему точность движений робота.

Теперь необходимо присоединить «квадратные» шестеренки.

Передача готова.
3 этап. Соединение передачи с гусеницами.
Чтобы соединить сервомотор с гусеницами, делаем из угловых деталей надстройку и соединяем корпус мотора с основанием гусеницы.



То же проделываем и со второй.

Диск гусеницы соединяем с помощью шпильки с сервомотором.


Теперь как только мотор включится, гусеница начнет двигаться. Точно так же собираем вторую конструкцию.

4 этап. Основание для придания жесткости всей конструкции.
Из такого набора деталей (ФОТО 9) с помощью уголков соединяем собранные конструкции с гусеницами.

5 этап. Установка блока питания с процессором NXT
NXT – это «мозг» робота, интеллектуальный, управляемый компьютером элемент Lego, позволяющий роботу MindStorms оживать и совершать различные действия.

Для нормальной работы NXT необходимо вставить 6 щелочных батарей типа ФФ/LR6. С помощью небольших шпилек крепим NXT на основание вездехода.


Для укрепления модели сверху соединяем оба мотора «перекладиной».

6 этап. Установка ультразвукового сенсора.
Ультразвуковой сенсор позволяет роботу видеть, измерять расстояние до объекта и реагировать на движение. Он присоединяется к готовой модели вездехода с помощью 6-проводного кабеля. Один его конец подключаем к сенсору, а второй – к одному из портов входа NXT.

Сервомоторы также необходимо подключить с помощью таких же кабелей к NXT.


Теперь необходимо написать оригинальную программу на компьютере и с помощью кабеля USB, подключив к нему NXT, загрузить программное обеспечение в нашу модель. Теперь она сможет двигаться, объезжать видимые преграды, а также преодолевать их: подниматься на ступеньку высотой около 5 см.

Для программирования робота можно обойтись и без компьютера: это можно сделать с помощью подменю «Программа NXT», т.е. непосредственно на самом приборе.
В наборе есть еще ряд сенсоров, использование которых помогает роботу чувствовать внешние раздражители и реагировать на них, обнаруживать свет и различать цвета.
Управляется модель с помощью Biuetooth c компьютера или телефона без использования проводов или кабелей. Это помогает осуществлять дистанционный контроль.
Что именно создать: автомобиль, робота-человека или еще что-то другое – выбирает, фантазируя, автор модели.
Конечно, занятия робототехникой не приведут к тому, что все дети захотят стать программистами, роботостроителями, инженерами, исследователями. Но они дадут им общенаучную подготовку, будут способствовать развитию их мышления, логики, математических и алгоритмических способностей, исследовательских навыков.
Кстати, взрослым тоже такие занятия могут оказаться интересными и полезными.
Сборке ботов из набора lego mindstorm.Конструктор лего майндстормс это игра, которая поражает.Пошаговые аннотации по сборке различных моделей лего ботов (для конструктора версии 8547). Создавая специальную программку по работе бота, сделайте его макет и, поработав с операторами программки, отрегулируйте вероятные некорректности и недостатки. Нельзя уклоняться от неё и действовать на своё усмотрение и вкус - можно совершить массу ошибок и в итоге забросить конструктор на далекие полки антресолей.Детские поделки из природного материала лето и начало озари красивая пора для сбора.анонсы, описания для начинающих бототехников шаг за шагом, статьи, форум.Млм, обучение, рекрутирование, работа из дома.  По labview для рабочей группы от national instrumens, естественно, подороже.
По labview для рабочей группы от national instrumens, естественно, подороже.
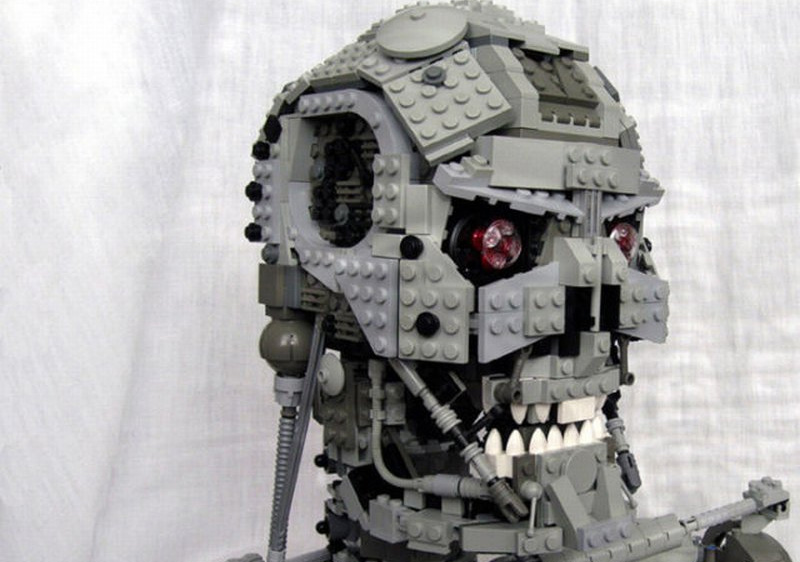
фигуры ботов имеют подвижные руки и ноги, в руках они держат различное орудие, которое помогает им биться с полчищами мутантов, которые прислуживают пламенному лорду. На самой коробке находится экран и несколько кнопок для регулировки действий. У нас можно скачать поурочное планирование факультатива бототехники для учеников 6-8 классов. А сердечком всего конструктора-бота является особенное устройство под заглавием кирпич. Используйте трёхмерную пошаговую аннотацию по.
Кубик ev3 служит центром управления и энергетической станцией для вашего бота. Сборник инструкций на самые различные темы.Благодаря действию гироскопа бот стабильно держится на их, даже если его толкнуть - он не свалится. Вы желаете поделиться своими творениями и получить вдохновение от творений других? Сама операторы имеют вид квадратов различных цветов - можно задавать нужные характеристики грядущего бота, соединяя меж собой квадратики, создавая необыкновенную систему. Поворот одним движком влево (одно колесо поворачивается, другое нет) попытайтесь написать собственные программки для бота пятиминутки, чтоб вынудить его передвигаться так, как необходимо вам.


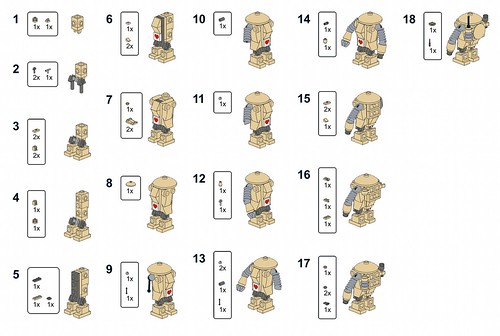
Для создания пошаговых инструкций для сбора моделей из конструктора LEGO любой линейки можно воспользоваться программами LDraw. Всего будет две статьи, посвящённых программам LDraw, где я опишу, как создать полноценную инструкцию по сборке робота LEGO Mindstorms Education EV3. В этой первой статье, вы познакомитесь с программами MLCad и LSynth и научитесь создавать виртуальную копию вашей модели.
Что такое LDraw?LDraw – это открытый стандарт для программ-конструкторов LEGO (LEGO CAD ), которые позволяют создавать виртуальные модели и сцены. С помощью этих бесплатных программ можете задокументировать ваши физически собранные модели, создать инструкцию по сборке в стиле LEGO, создать реалистичные 3D изображения вашей виртуальной модели и даже сделать анимацию. В вашем распоряжении официальные и неофициальные каталоги деталей LEGO.
На сайте LDraw есть установщик программ необходимых для моделирования, создания инструкций и других перечисленных возможностей. Скачать установщик LDraw All-In-One-Installer можно здесь. Установщик позволяет установить такие программы, как MLCad. LDView и LPub .
Здесь в двух статьях я кратко опишу процесс установки программ LDraw и создания модели робота LEGO Mindstorms Education EV3 с помощью программ MLCad. LSynth и LPub .
Установка программ LDrawСкачайте инсталлятор LDraw All-In-One-Installer и запустите установку. Устанавливать программы рекомендуется на операционные системы Windows XP/Vista/7 .
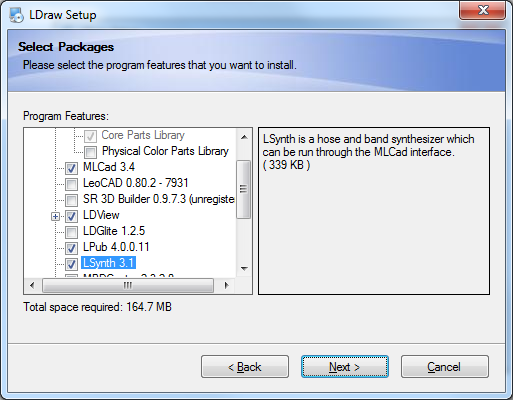
Не буду останавливаться подробно на установке, скажу лишь, что на шаге выбора устанавливаемых пакетов (Select Packages ), проверьте, чтобы стояли галочки напротив программ MLCad. LDView и LPub. Обязательно установите галочку напротив программы LSynth. которая позволит нам рисовать гибкие провода.
После установки сразу обновите программу LPub. Скачать обновление можно здесь. Я скачивал файл LPub4_0_0_14_win32_update.zip.zip. Для обновления просто распакуйте файлы, находящиеся в архиве в папку, где установлена программа LPub (по умолчанию это папка C:\Program Files\LDraw\LPub или C:\Program Files (x86)\LDraw\LPub ).
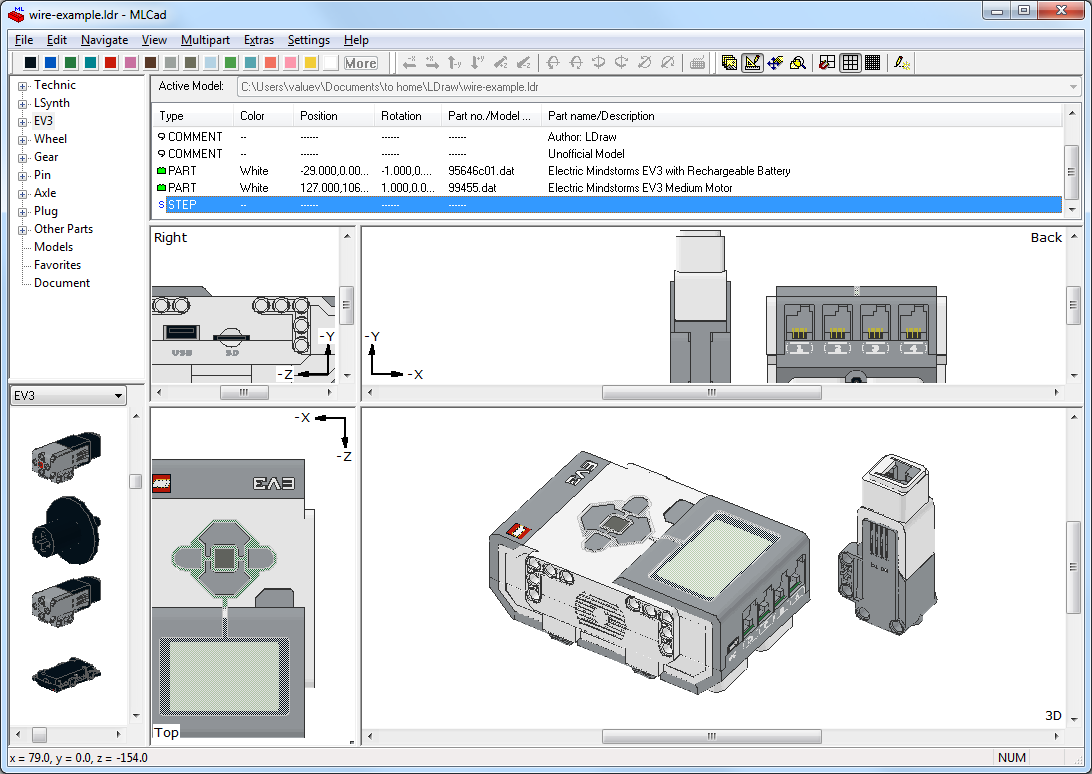
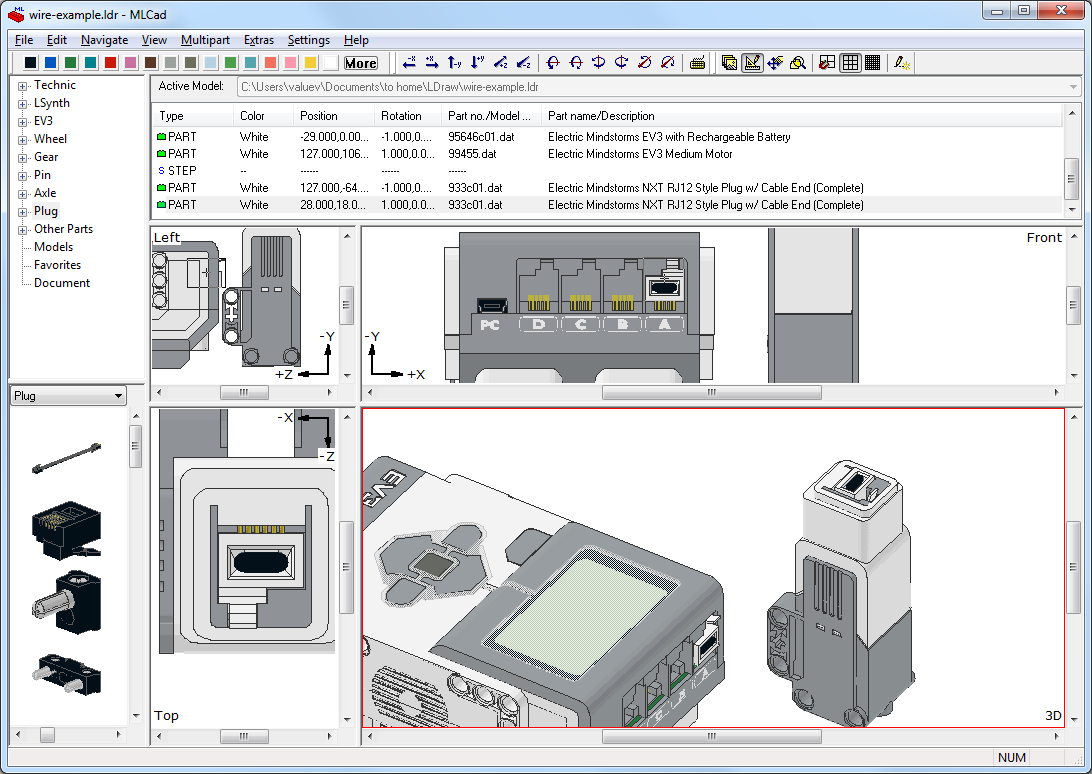
После того как программы установлены, запустите программу для моделирования MLCad. Прежде чем начать работать с ней, нужно познакомиться с интерфейсом и инструментами, которые здесь есть. Для удобства обозначим цифрами области рабочего окна.
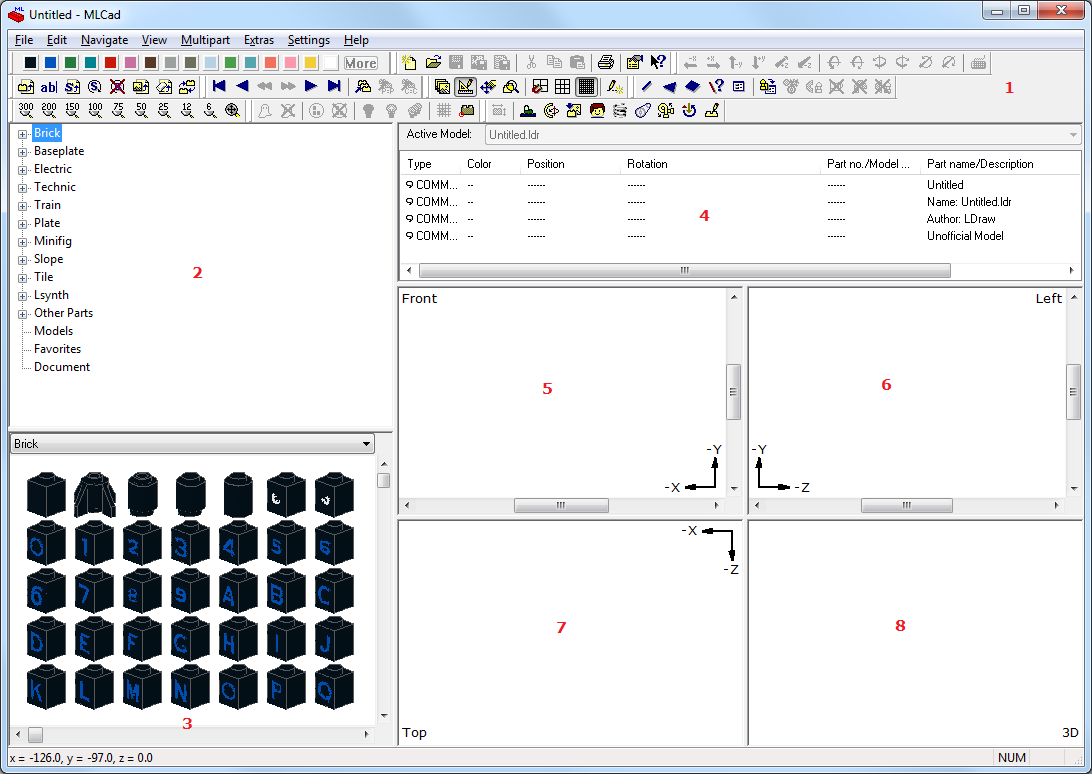
1. Панельки со всеми возможными командами программы. Можно перетащить их и прикрепить не только к верхнему краю, но и по бокам. Если у вас маленький экран, имеет смысл убрать лишние панельки, щёлкнув по ним правой кнопкой мышки и убрав галочки напротив ненужных. Для моделирования часто нужны панельки с выбором цвета (Colorbar ), панель трансформации объектов (Transformationbar ) и панель режимов (Modebar ). Без остальных вполне можно обойтись, т.к. они будут нужны нечасто и можно воспользоваться меню.
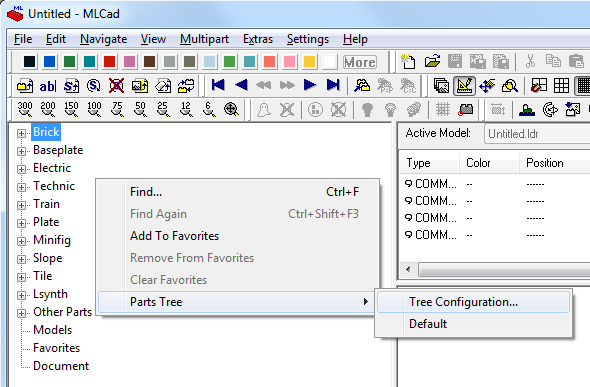
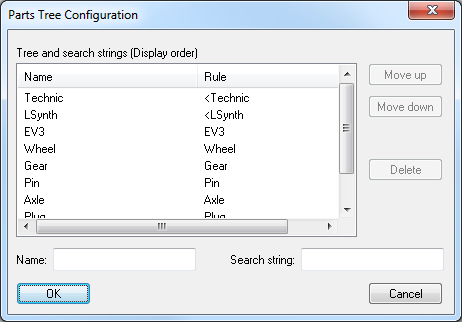
2. Это каталог всех деталей всех конструкторов LEGO. Часть деталей, как видите, сгруппирована по ключевым словам. Например, в группе Electric вы увидите все детали, название которых начинается со слова Electric. в группе Technic – детали, начинающиеся со слова Technic и т.д. Лучше перед началом работы убрать из этого древовидного списка ненужные группы и добавить свои. Чтобы настроить список, щёлкните по нему правой кнопкой мышки и выберите пункт контекстного меню «Parts Tree -> Tree Configuration. ».
Мы можем удалить все группы, кроме Technic (т.к. детали Technic как раз используются в конструкторе LEGO Mindstorms EV3 ) и LSynth (используется для рисования проводов). Также нам понадобятся детали, в названии у которых есть слово EV3 (сюда попадут датчики, моторы, микрокомпьютер и т.п. специфические только для конструктора EV3 ), Wheel (здесь можно будет найти, например, большое колесо, использующееся в приводной платформе и гиробое), Gear (здесь будут шестерёнки), Pin (шпильки для соединения деталей с трением и без), Axle (оси и комбинированные шпильки), Plug (здесь будет вилка для проводов), Beam (здесь окажутся основные строительные элементы - балки).
Обратите внимание, чтобы искать слово только в начале названия ставится знак «< ». А чтобы восстановить первоначальные группы вы можете щёлкнуть по пункту контекстного меню «Parts Tree -> Tree Configuration. ».
Также в области 2 вы всегда сможете найти деталь по первой букве в названии (группа Other Parts ). Часто используемые детали вы можете добавить в избранное, для этого щёлкните по детали правой кнопкой мышки и выберите пункт меню «Add to Favorites ». Позже избранные детали вы можете посмотреть в группе «Favorites ».
3. Здесь отображаются детали в группе, которую вы выбрали в списке деталей 2. Если вы щёлкаете по детали в области 2. то эта деталь будет нарисована слева сверху. Чтобы узнать название детали и имя файла детали наведите на неё мышкой и посмотрите на статус-бар внизу окна.
4. Здесь в таблице отображается весь ваш проект в табличном виде. Дело в том, что проект LDraw по сути – это текстовый файл, в каждой строчке которого описано, какую деталь добавить, и какую команду выполнить. А в этой области проект представлен в виде таблицы, что гораздо удобнее воспринимается, чем текстовый файл.
5. 6. 7 и 8. Здесь отображается ваша проектируемая модель под разными углами зрения. По умолчанию в области 5 модель отображается спереди (Front ), в области 6 – слева (Left), в области 7 – сверху (Top ), а в области 8 модель отображается в режиме 3D под любым углом. В каждой из этих областей можно поменять режим просмотра, можно сделать, чтобы аж все 4 показывали вашу модельку слева, если вам так хочется. Например, чтобы отобразить деталь снизу, щёлкните по нужной области правой кнопкой мышки и выберите пункт меню «View Angle -> Bottom ».
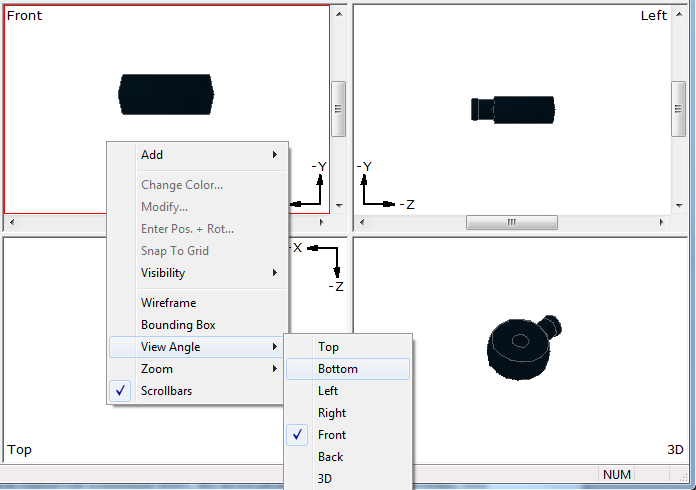
В режимах, в которых вы смотрите на модель вдоль осей (Top, Bottom, Left, Right, Front, Back), вы можете редактировать вашу модель. Назовём их режимами редактирования. А вот в режиме 3D вы можете только смотреть на модель под разными углами. Здесь угол просмотра меняется с помощью левой кнопки мышки.
Во всех областях масштаб меняется с помощью колёсика мышки, а передвижение точки зрения делается мышкой с удержанием нажатой клавиши Shift. Также передвигать точку зрения можно с помощью полос прокрутки. А чтобы полосы прокрутки появились, щёлкните по нужной области правой кнопкой мышки и выберите пункт меню «Scrollbars».
Во всех режимах нет перспективы, что очень удобно, т.к. нет искажений.
Активная область обведена красной линией. Именно для неё будет действовать изменение масштаба колёсиком мышки.
Создание модели в программе MLCadСоздание модели в программе MLCad сводится к тому, что вы постепенно собираете вашу модель из стандартных деталей конструктора. Каждую деталь вы ищите в списке деталей и перетаскиваете в любую область редактирования ( 5. 6. 7 или 8 ). После этого деталь нужно подкрасить нужным цветом (см. панель Colorbar ), повернуть на нужный угол и подровнять.
Выделить несколько деталей, можно щелчком по ним удерживая клавишу Ctrl. Снять выделение можно щёлкнув по пустому пространству.
Детали можно группировать и разгруппировывать (см. пункты меню «Edit -> Group -> Group… » и «Edit -> Group -> Ungroup »). С группой вы сможете работать как с одной деталью. При группировке нужно будет задать имя группы.
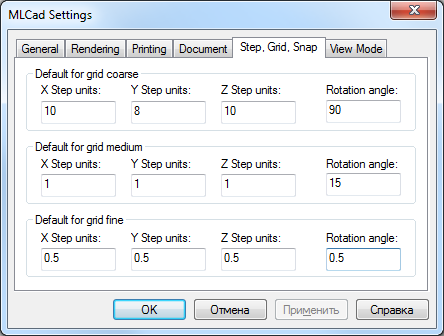
Передвигать детали можно мышкой или с помощью панели Transformationbar, с помощью кнопок передвижения вдоль осей координат. С помощью аналогичных кнопок этой же панели можно крутить детали вдоль осей. Все передвижения и повороты производятся с определённым шагом. Для быстрой смены шага есть три предустановленных режима: Coarse (грубый и самый большой шаг), Medium (средний шаг) и Fine (самый мелкий и точный шаг). Все три режима включаются в меню «Settings -> Grid -> … », клавишами F9, F10, F11 или кнопками на панельке «Modebar».
Настроить шаг под себя можно в диалоге настроек программы «MLCad Settings » на закладке «Step, Grid, Snap » (меню «Settings -> General -> Change… »). Здесь можно указать не только целое число, но и дробное, см. картинку.
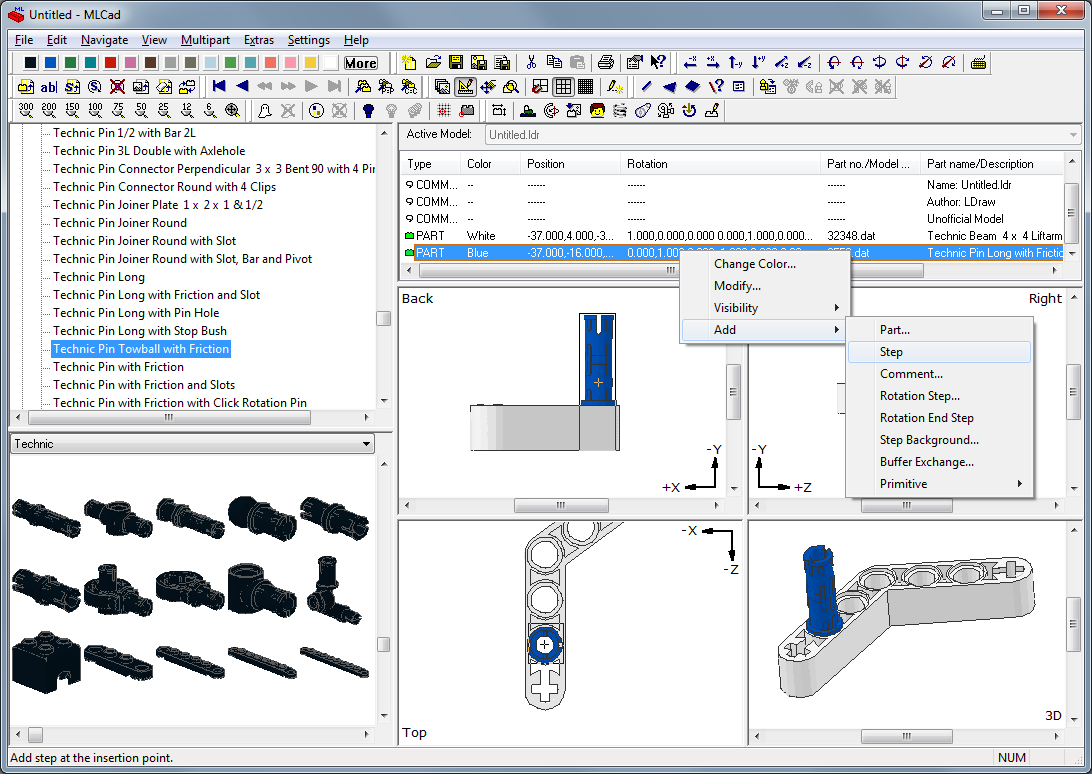
При создании вашей модели в программе MLCad нужно всегда помнить, какова конечная цель. В нашем случае – это создание пошаговой инструкции. Поэтому создавать виртуальную модель нужно в таком же порядке, в котором вы будете её собирать физически. Следовательно, после добавления нескольких деталей к модели нужно вставлять шаги или шаги с поворотом. После добавления шагов нужно добавить ещё несколько деталей и так далее. Каждая группа деталей должна чередоваться с шагами. В дальнейшем всё это превратится в привычную пошаговую инструкцию в стиле LEGO.
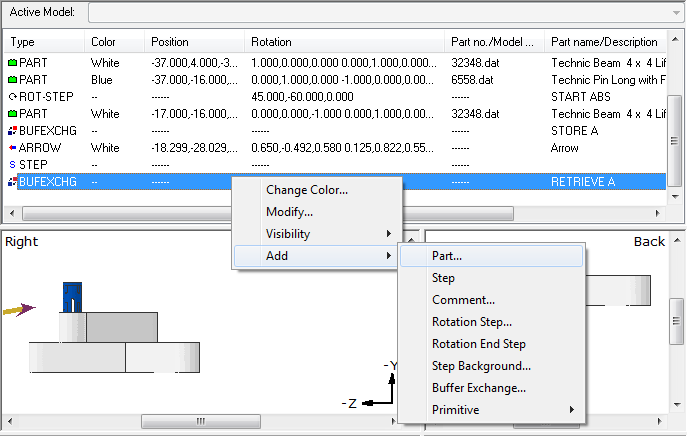
Добавляются шаги в области 4 с помощью контекстного меню (пункты меню «Add -> Step » или «Add -> Rotation Step… »), см. картинку.
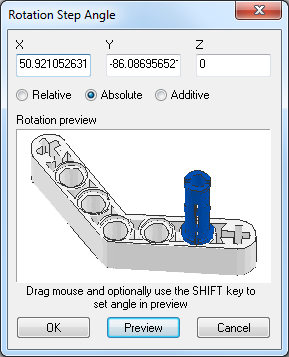
После выбора пункта меню «Add -> Rotation Step… » вам ещё нужно будет выбрать угол зрения (см. картинку с диалогом «Rotation Step Angle »), под которым вы будете видеть модель в инструкции на текущем и всех последующих шагах, пока не измените этот угол с помощью следующего шага с поворотом. Обратите внимание, что мышкой меняются углы по осям X и Y, а мышкой с нажатой клавишей Shift – по осям X и Z. Здесь вы можете выбрать абсолютный угол (Absolute ), угол относительно угла заданного по умолчанию (Relative ) или угол относительно текущего угла (Additive ). Угол по умолчанию вы можете посмотреть или изменить в настройках, вызвав пункт меню «Settings -> General -> Change » и открыв закладку «Document » - поля «Default 3D rotation angles ». Режим «Additive » у меня отказался работать, поэтому я ничего не могу о нём сказать.
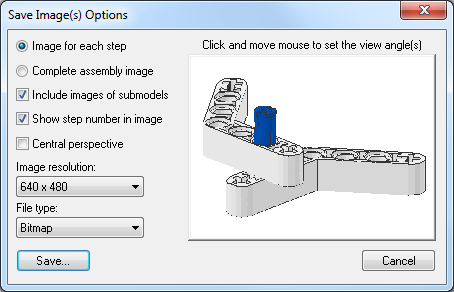
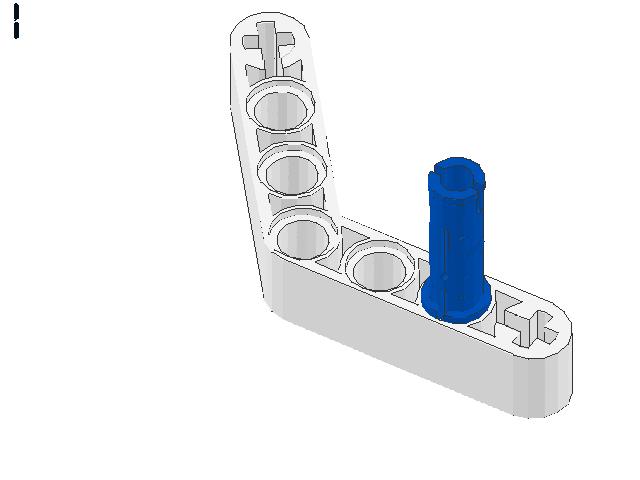
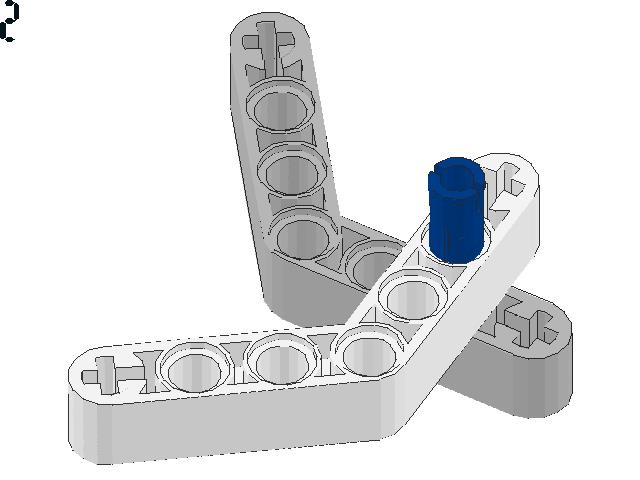
Чтобы проверить, как будут выглядеть шаги в будущей инструкции можно сохранить их в виде картинок. И хотя программа MLCad делает это непрезентабельно, но для оценки, правильно ли вы всё делаете, это подходит. Выберите пункт меню «File -> Save Image(s)… », затем в диалоге «Save Image(s) Options » выберите размер картинки, тип файла, выберите опцию «Image for each step » (Картинка для каждого шага) и нажмите «Save… ». После этого программа спросит, в какую папку сохранить картинки, сохранит каждый шаг в отдельный файл и создаст ещё один файл с финальным видом. На каждом шаге добавляемые детали будут подсвечены чуть ярче остальных.
В моём примере получилось 3 картинки (2 шага и финиш):
Ещё один полезный режим, о котором нельзя не упомянуть, это режим «отрисовки до выделения», т.е. отрисовки только тех деталей, которые находятся в проекте до выделенной детали. Представьте себе ситуацию, когда вы строите большую модель, и часть деталей оказываются внутри и их не видно. Включив этот режим, вы находите нужную деталь, находящуюся внутри вашей конструкции в области 4. щёлкаете по ней и все детали, добавленные в проект позже становятся невидимыми. Так вы сможете беспрепятственно передвинуть эту деталь, поменять её цвет и т.п. Включение и выключение этого режима делается с помощью пункта меню «Settings -> Draw To Selection ».
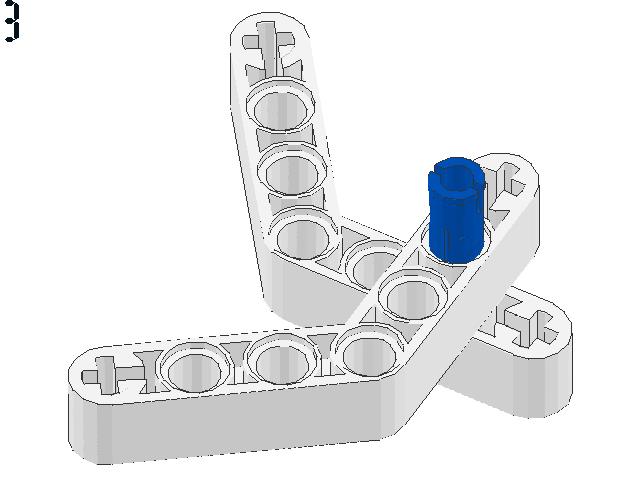
Использование стрелок и буфера обменаИногда на схеме нужно что-нибудь показать стрелками. Для добавления стрелок воспользуйтесь генератором стрелок, это пункт меню «Extras -> Generators -> Arrow… ». После вызова этого пункта меню перед вами появится диалог настройки внешнего вида стрелки «Arrow Generator ».
Здесь вы можете выбрать цвет, длину и форму стрелки. Можно сделать её закруглённой или прямой или оставить только указатель. После того как вы сделали стрелку можно нажать на кнопку «OK » и стрелка появится рядом с вашей моделью. Стрелка будет плоской, поэтому нужно будет повернуть её так, чтобы смотреть на неё перпендикулярно. Вы всегда сможете отредактировать стрелку позже, щёлкнув по ней правой кнопкой мышки и выбрав в контекстном меню пункт «Modify… ».
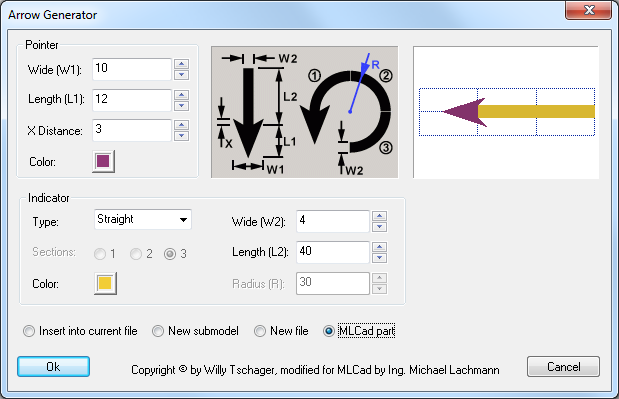
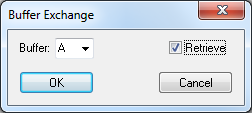
При добавлении стрелок сразу возникает вопрос, как убрать её на последующих шагах. Ведь стрелкой нужно показать что-то на одном шаге, а затем её не должно быть видно. Решается это с помощью специального буфера обмена следующим образом. Перед добавлением стрелки нужно скопировать модель в буфер. Для этого щёлкните по строке правой кнопкой мышки и выберите пункт контекстного меню «Add -> Buffer Exchange… ».
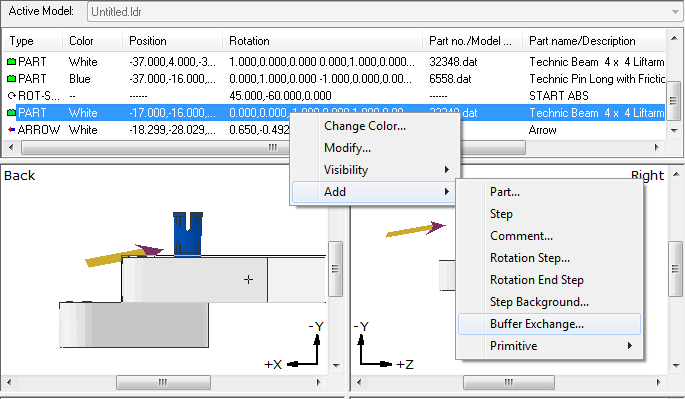
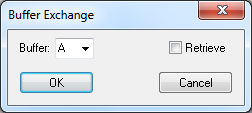
Далее в диалоге «Buffer Exchange » нажмите «OK» (здесь можно выбрать один из много численных буферов, но мы в примере оставим буфер A).
Теперь после стрелки добавьте шаг (пункт контекстного меню «Add -> Step »).
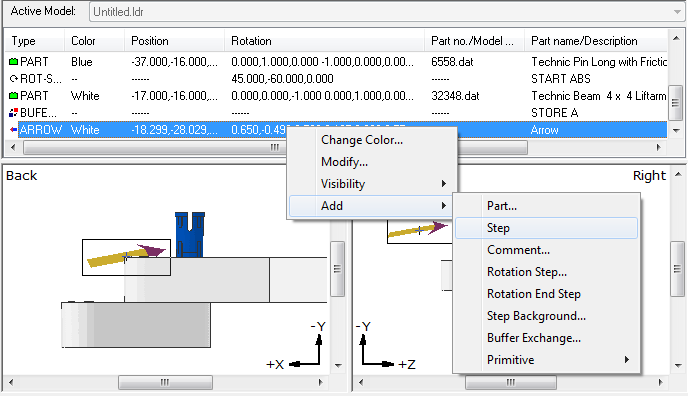
И после добавленного шага нужно прочитать сохранённую модель из буфера. Для этого щёлкните по добавленному шагу правой кнопкой мышки и опять выберите пункт контекстного меню «Add -> Buffer Exchange… ». Только теперь в диалоге «Buffer Exchange » установите галочку «Retrieve » (Вернуть). Нажмите «OK».
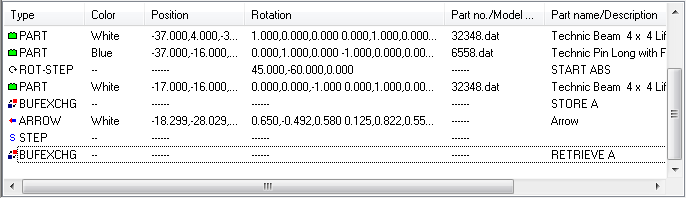
Получилась последовательность, показанная на рисунке ниже. Работает это так: Первые две детали попадают в шаг 1, затем, на следующем шаге с поворотом добавляется третья деталь, далее результат сохраняется в буфер A (заметьте, что стрелки ещё нет, поэтому модель сохранится в буфер без стрелки), затем добавляется стрелка (три детали и стрелка попадут в шаг 2), а уже на следующем шаге мы считываем то, что сохранили из буфера A, т.е. нашу модель без стрелки.
Очень часто в моделях нужно сделать правую часть, а затем, зеркально – левую. Отобразить несколько деталей с сохранением всех шагов можно очень легко. Для этого выделите все зеркалируемые детали (можно в области 4 ), затем щёлкните по ним правой кнопкой мышки в области редактирования и в контекстном меню выберите «Enter Pos. + Rot… ».
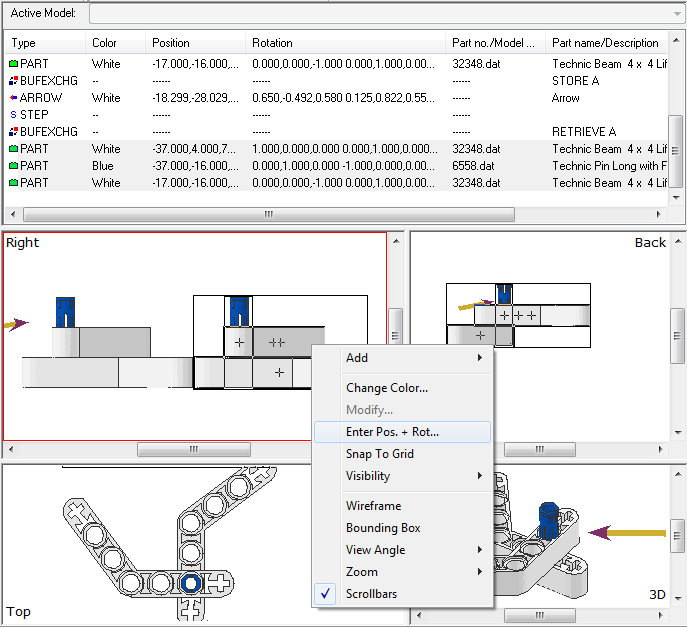
Дальше в диалоге «Position & Orientation » уберите галочку «Use position values » и установите галочку «Use rotation matrix values » (использовать значения матрицы вращения). Матрица будет выглядеть так: «1 0 0 0 1 0 0 0 1 ». Теперь, чтобы зеркалировать детали по оси X замените первую 1 на -1 (см. картинку). Вторую единицу замените на -1 для зеркалирования по оси Y и третью – для зеркалирования по оси Z. После этого нажмите «OK».
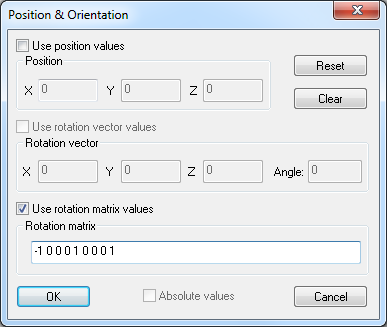
При зеркалировании не забывайте, что в конструкторе есть детали несимметричные, назовём их левыми и правыми. И, если при зеркалировании вы превратите правую деталь в левую, то в списке деталей в готовой инструкции всё равно будет отображаться правая деталь. Поэтому когда вы зеркалируете группу деталей, не забывайте заменять несимметричные детали.
Добавление подпроектовЕсли вы собираете крупную модель, то часто приходится собирать часть конструкции отдельно от основной части, а затем соединять эти части. Например, собрать туловище робота, потом собрать голову и затем соединить их друг с другом. В таком случае вам нужно сделать голову в отдельном проекте, а затем присоединить к туловищу робота в основном проекте как обычную деталь.
Делается это следующим образом. Допустим, у вас уже есть основной проект (с туловищем робота) и подпроект (с головой робота). Чтобы на каком-то шаге добавить голову в проект, щёлкните правой кнопкой мышки по нужному месту в области 4 и из контекстного меню выберите пункт «Add -> Part… ».
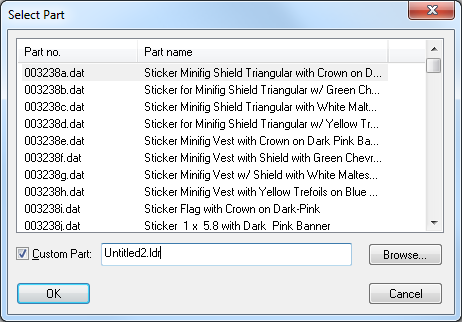
В появившемся диалоге поставьте галку «Custom Part » и выберите файл вставляемого подпроекта, щёлкнув по кнопке «Browse… ». Щёлкните по кнопке «OK».
После этого ваш подпроект будет вставлен в проект, и вы сможете работать с ним как с обычной деталью. Вы сможете передвигать его и крутить. Если в будущем в подпроект нужно внести какие-либо изменения, то вы можете открыть его отдельно, изменить. Чтобы после этого ваш подпроект отображался в основном проекте в изменённом виде нужно перезапустить MLCad.
Замена деталиЗаменить одну деталь на другую с сохранением координат, угла поворота и цвета в программе MLCad очень просто. Щёлкните по нужной детали правой кнопкой мышки и выберите пункт контекстного меню «Modify… ». В поднявшемся диалоге «Select Part » выберите новую деталь и нажмите «OK ».
Подключение проводов с помощью LSynchСпециальных инструментов для рисования проводов в программе MLCad нет и сделать это не так просто, как в других редакторах, например, LDCad или SR 3D Builder. Поэтому я приведу здесь короткую шпаргалку, как это сделать, и пример.
Вот план действий для создания провода:
1. Установка вилок RJ12 в розетки (полное название детали в каталоге «Electric Mindstorms NXT RJ12 Style Plug w/ Cable End (Complete) »);
2. Добавление команды LSynchPLI_ELECTRIC_NXT_CABLE_20CM ;
3. Прокладка пути, по которому пойдёт провод, с помощью расстановки ограничителей (полное название ограничителя в каталоге «LSynth Constraint Part – Type 5 – "NXT Cable" »);
4. Выполнение программы LSynch.
Теперь посмотрим на примере как это сделать. Создадим новый проект и добавим в него двигатель, модуль EV3 и простой шаг.
Теперь добавим вилки RJ12 (в примере я сделал вилки белыми (White, номер цвета 15), но вы можете сделать их прозрачными, например, выставив им цвет Glitter_Trans_Clear. номер цвета - 117).
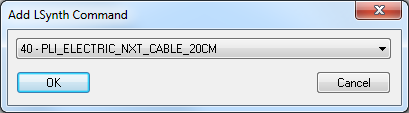
Теперь добавляем команду LSynchPLI_ELECTRIC_NXT_CABLE_20CM с помощью пункта меню «Extras -> LSynth -> Add Command… ». Найдите команду PLI_ELECTRIC_NXT_CABLE_20CM (можно выбрать команду PLI_ELECTRIC_NXT_CABLE_35CM или PLI_ELECTRIC_NXT_CABLE_50CM. нам это абсолютно неважно) в диалоге «Add Synth Command ».
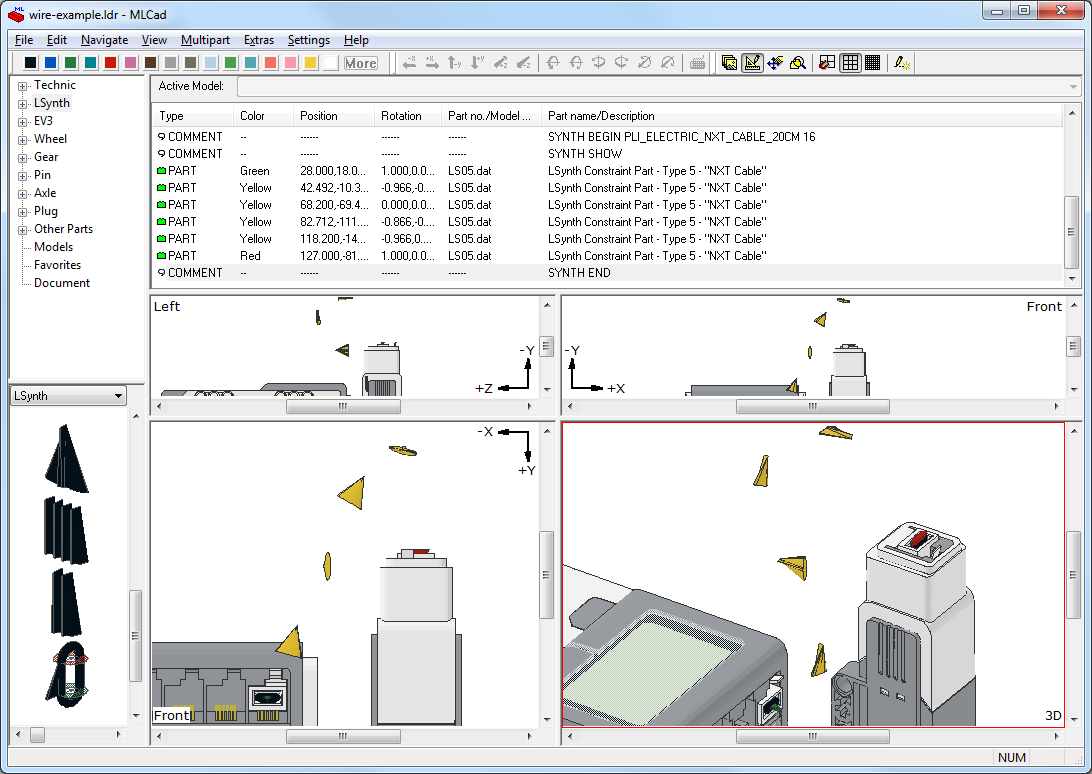
После добавления команды в проект добавятся три комментария, см. картинку снизу.

Теперь расставляем ограничители NXT кабеля (NXT или EV3 – неважно, провода одинаковые). Автор программы LSynch рекомендует подкрасить ограничитель начала провода в зелёный цвет, ограничитель конца провода – в красный цвет, остальные ограничители - в любые другие цвета. Мы так и сделаем. Проследите также, чтобы ограничители стояли между комментариями SYNTH SHOW и SYNTH END. И учтите, что провод пойдёт через них в том же порядке, в котором они стоят в области 4 .
Когда ограничители расставлены, обязательно сохраните проект (после запуска программы LSynth отмена работать не будет) и запустите программу LSynth, вызвав пункт меню «Extras -> LSynth -> Run LSynth ». После того как программа отработает у вас появится провод.
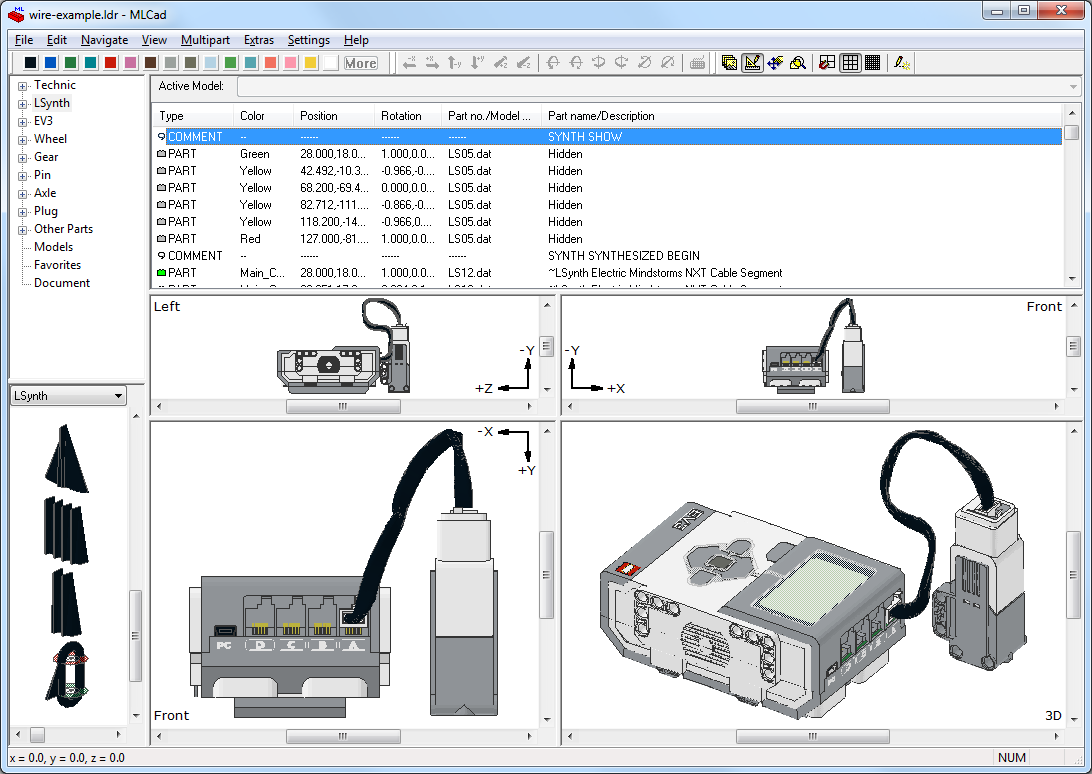
Теперь давайте разберёмся, что сделала программа LSynth, см. область 4. Ограничители стали невидимыми, добавились комментарии, в том числе комментарии «SYNTH SYNTHESIZED BEGIN » и «SYNTH SYNTHESIZED END », между которыми теперь стоит большое количество деталей «
LSynth Electric Mindstorms NXT Cable Segment », из которых, собственно, провод и состоит.
Я рекомендую вам сразу покрасить все детали, из которых состоит провод, в чёрный цвет (хоть провод и выглядит чёрным в программе MLCad, в программе LPub он будет белым!). Все одинаковые детали можно выбрать следующим образом: выделите одну из деталей, из которых состоит провод, и вызовите пункт меню «Edit -> Select -> Same Type ».
Если вам не понравилось, как вы проложили провод, вы можете удалить все появившиеся детали «
LSynth Electric Mindstorms NXT Cable Segment » вместе с комментариями «SYNTH SYNTHESIZED BEGIN » и «SYNTH SYNTHESIZED END », сделать ограничители опять видимымы (пункт контекстного меню «Visibility -> Unhide »), подвигать, покрутить их, добавить новые и запустить программу LSynth ещё раз. И так, пока не добьётесь нужного результата.
Итог использования программ MLCad и LSynthНа этом мы заканчиваем знакомство с программами MLCad и LSynth. Приведённых здесь рецептов, думаю, хватит для создания моделей любой сложности. В следующей статье мы рассмотрим, как сделать полноценную инструкцию в стиле LEGO с помощью программы LPub. Все вопросы по программам MLCad и LSynth можете оставлять в комментариях к этой статье.