







 Рейтинг: 4.6/5.0 (1846 проголосовавших)
Рейтинг: 4.6/5.0 (1846 проголосовавших)Категория: Инструкции

Эти роботы дадут тебе возможность вполной мере познакомиться ссерией ev3. Инструкция, которая есть на диске программного обеспечения, предлагает несколько первоначальных, несложных в сборке. Соберите робота из элементов lego.соберите робота. Просто люблю готовить и все тут, а особенно эксперементировать со старыми рецептами, добавляя в них какие-нибудь новые ингредиенты. Скачивайте, ознакамливайтесь с по, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Пошаговая инструкция по созданию в данной инструкции мы расскажем вам, как можно построить самостоятельно роботизированную руку с комплектом lego mindstorms nxt. Diy как построить и запрограммировать nxt lego робота. Цель этого робота уберечь ваш компьютер в спящем режиме без изменения настроек. Красноярске можно в фирме ооо позитив плюс или системные решения.
Собери робота - mindstorms lego comДобавляем к роботу пятиминутке датчик цвета и получаем из робота пятиминутки настоящего всем хорош бот-внедорожник манёвренный, бронированный, умный. Данная серия hero factory является аналогом биониклов, поэтому её с радостью воспримут поклонники мультфильмов про роботов. Можно не ограничиваться инструкцией с диска или брошюрой, а немного поразмыслить, и сконструировать свои программируемые модели!




 Начиная с mindstorms - робота для продвинутых пользователей и даже профессионалов, заканчивая персонажами легенд hero factory, ninjago, chima и др. Космический робот, который можно собрать по инструкции brick 9613, без труда способен передвигаться по любой поверхности различных планет и исследовать их.
Начиная с mindstorms - робота для продвинутых пользователей и даже профессионалов, заканчивая персонажами легенд hero factory, ninjago, chima и др. Космический робот, который можно собрать по инструкции brick 9613, без труда способен передвигаться по любой поверхности различных планет и исследовать их.



















February 25, 2014
Кто ещё не знаком с конструктором "Лего"? Наверное, уже не найти такого человека. Конструктор совсем недавно вошёл в нашу жизнь и навсегда завоевал любовь и интерес. Недаром в деталях "Лего" предусмотрено столько вариантов фигур, что полёт фантазии не имеет границ. Это просто неоценимо для развития мышления и моторики детей. Да и взрослые не откажутся повозиться с конструктором.

Собирать различные предметы из конструктора - хорошее занятие для всей семьи. Фантазия детей не знает пределов, головки маленьких выдумщиков всегда полны новых идей. Многие мальчишки собирают из конструктора фигурки любимых героев мультфильмов, трансформеров, и такая проблема, как сделать робота из "Лего", для них не является трудной.

Возникли целые группы, сообщества, проводятся выставки и соревнования. Конечно же, роботы из "Лего" могут быть самыми разнообразными, причём не только по форме. Как известно, фирма, выпускающая конструкторы "Лего", включила в комплекцию деталей разнообразные блоки управления, моторчики, с помощью которых можно делать шагающего человечка-робота, выполняющего определённые действия, а запускается все это с помощью специальных и несложных компьютерных программ.
Идеи для роботаСуществуют даже школы, обучающие тому, как сделать робота. Из "Лего" строить и собирать научат даже самого маленького ученика. Компанией предусмотрены пакеты деталей по сборке настоящих роботов. Мы можем видеть самые разнообразные планки, штанги, оси, электронные датчики и моторчики, а также другие составляющие конструктора.
А сердцем всего конструктора-робота является особое устройство под названием "кирпич". Это процессор будущего робота. Если говорить образно, то его мощность подобна процессору смартфона. Звучит довольно впечатляюще, не правда ли?
В чём заключается работа процессора? На входных разъёмах идёт считывание информации с разных датчиков. Это может быть датчик движения, цвета, например, расстояния или гироскопа. А на выходе отдаются соответствующие команды относительно скорости или мощности движения. На самой коробочке находится экран и несколько кнопок для регулировки действий.

Если вы твёрдо настроены создать робота, выполняющего определённые действия и движения, надо выбрать специализированный набор конструктора с конкретными деталями и двигателями для этой игрушки. Именно в таком наборе и будет находиться "кирпич". В инструкции по сборке пошагово расписаны все действия относительно того, как сделать робота из "Лего".
Для более удобного ознакомления следует установить лэптоп для просмотра роликов по обучению и программированию. Сама среда программирования достаточно понятна и создана для быстрой сборки блок-системы.
Операторы имеют вид квадратов разных цветов - можно задавать необходимые параметры будущего робота, соединяя между собой квадратики, создавая особую систему. И при нажатии всего лишь одной кнопки через USB передаются заданные параметры. Если вы не представляете образно, как сделать робота из "Лего", тогда сначала попробуйте это на компьютере. Создавая специальную программу по работе робота, сделайте его прототип и, поработав с операторами программы, отрегулируйте возможные неточности и недочёты.
Джиробой - базовый робот для новичковОдним из более популярных роботов "Лего" является Джиробой. Его широко рекламируют в видеороликах на "Ютубе", и готовая модель представлена в офисе компании, продающей конструкторы "Лего". Это базовый вариант, который подойдёт для начинающих сборщиков роботов. На ногах Джиробоя, параллельно друг другу, расположены колёса. Благодаря действию гироскопа робот устойчиво держится на них, даже если его толкнуть - он не упадёт.
Благодаря действию установленных датчиков робот регулирует своё движение. Достаточно показать цветную пластину, и он, согласно установленной программе, будет двигаться в определённом порядке. Например, зелёная пластинка сигнализирует движение вперёд, красная – стоять, а вот жёлтая и синяя поворачивают его в разные стороны. Проще не бывает.

Для начала надо создать основу конструкции. О том, как сделать из "Лего" робота, подробно расписано в инструкции. Нельзя уклоняться от неё и действовать на своё усмотрение и вкус - можно совершить массу ошибок и в итоге забросить конструктор на дальние полки антресолей.
Начинаем собирать тело робота, а потом просто загружаем соответствующую программу для работы датчиков. На первый взгляд ничего проще не может быть. Но в тексте инструкции 120 шагов, которые должны быть выполнены точно. Без терпения и усидчивости не обойтись, собирая конструкции "Лего". Как сделать маленького робота? Следует обострить своё внимание и наблюдательность, поскольку сотни мельчайших деталей способны привести в замешательство.
Инвестиция времени в развитие детейНе стоит бояться мелких вещей и жалеть своё время, поскольку вы инвестируете потраченные на сборку часы в общение с ребёнком и его развитие. Это неоценимый вклад в будущее детей. Такие конструкторы отлично развивают мышление, логику, усидчивость и терпение. Если ребёнок предложит вам сделать робота из "Лего", смело беритесь за дело и погружайтесь в интереснейший мир трансформеров.
как сделать из лего робота инструкция
Как сделать трансформераТрансформеры это легендарная мультипликационная вселенная. Впервые они появились на экранах еще в далекие 80 годы прошлого века, с тех пор под этим названием выходили самые разнообразные сериалы и полнометражные мультфильмы. Зачастую они даже не имели общего сюжета, но одна вещь всегда оставалась неизменной #8211 это противостояние Автоботов и Десептиконов.
Конечно же, такие колоритные персонажи не могли долго оставаться без собственной линейки игрушек и вскоре на прилавках магазинов появились отлитые в пластмассе Оптимусы, Бамблби, Мегатроны и другие. В продаже вы и сейчас без труда сможете найти как уже собранных роботов, так и прекрасные наборы от лего, которые вы как конструктор будете собирать самостоятельно. Это даст вам возможность почувствовать себя настоящим инженером.
Но, конечно же особым шармом обладают самоделки, то есть модели сконструированные и построенные самостоятельно из стандартных деталей конструктора lego. В этой статье мы вам расскажем именно о таких работах.
Оптимус праймЕсли у вас есть желание построить лидера Автоботов в его земной маскировке, то вам пригодится вот это видео. Здесь наглядно показано как и с какими деталями вам придется работать. К сожалению, за простоту конструкции вам придется заплатить тем, что полученный грузовик не сможет трансформироваться.
ИнструкцияИтак, вам понадобятся несколько разновидностей деталей:
Для того что бы правильно собрать все это воедино, воспользуйтесь выложенным выше видеороликом.
Еще один автоботЕсли вам все таки захочется собрать трансформирующегося Оптимуса, то вам стоит посмотреть как это сделано здесь:
Трансформер из lego technicВот мы и рассмотрели самые интересные модели трансформеров самоделок. Если у вас есть достаточно подходящих деталек и хотя бы немного опыта в конструировании из лего, вы сможете повторить большую часть из увиденного самостоятельно.
Конструкторы Lego являются очень привлекательными для многих детей. FIRST (For Inspiration and Recognition of Science and Technology) создал программу для маленьких детей, которые могут создавать роботов из Lego. Работая в команде, дети создают робота из этого комплекта для выполнения простых ежедневных задач. В этой инструкции мы научим вас, как создать робота из комплекта NXT Mindstorm. Мы расскажем вам, как написать и запустить программу для того, чтобы робот двигался вперед и назад.
Набор NXT Lego стоит приблизительно $100.
Для выполнения задания вам понадобится от 30 минут до 1:30 мин.
*Внимание: блоки Lego очень миниатюрные и маленькие дети могут их легко проглотить!*

После приобретения и распаковки комплекта NXT Lego вы найдете следующие детали, изображенные на фотографии:

элемент 1 – руки
элемент 2 – изгибы в форме L
элемент 7 – большие черные сцепки
элемент 8 – маленькие черные сцепки
элемент 9 – небольшие светло-серые сцепки
элемент 10 – большие светло-серые сцепки
элемент 11 – голубые сцепки
элемент 12 – темно-серые сцепки
элемент 13 – колпачки
элемент 14 – шасси
Возьмите одну из частей руки, две из небольших серых сцепок и четыре больших черных сцепки, как показано в верхней части фото. Поместите две серые сцепки в последние два отверстия на длинной стороне руки. Серые сцепки должны быть в четном количестве по обе стороны от отверстия. Поместите четыре черных сцепки на концах серых сцепок со стороной короны ближе к руке. Готовое изделие будет выглядеть как нижняя половина фото.

Шаг 3. Шасси. Часть 1:
Возьмите две оси NXT, большую серую и две черных сцепки. Правильные части отображаются в верхнем фото. Подключите две черных сцепки к концу серой части. Это показано в верхней половине второго фото. Концы черных сцепок должны быть размещены через середину одного отверстия из трех на оси рядом с оранжевым кругом. Готовый продукт для третьего шага будет выглядеть в нижней половине второго фото.


Шаг 4. Шасси. Часть 2:

Возьмите готовые детали из шагов № 2 и 3. Переверните конструкцию от третьего шага так, чтобы часть, которую вы вставили, была на дне и пустые отверстия рядом с большим кругом находились на самом верху. Черные кроны будут идти в два задних отверстия. Выполните это для обеих сторон конструкции с шага 2. Готовое изделие будет выглядеть как на фото выше.
Шаг 5. Ось колеса. Часть 1:
Возьмите две L-образные части с пятью отверстиями и самые длинные темно-серые сцепки, как показано в верхней части фото. Поместите длинную сторону темно-серой сцепки через первое отверстие на короткой стороне изгиба. Это будет выглядеть как нижняя половина фото. Протолкните темно-серый кусок на всю длину конструкции.

Шаг 6. Ось колеса. Часть 2:
Возьмите готовую конструкцию, начиная с шага 5, а также большие серые зубчатые передачи, как показано в верхней части фото. Придерживайтесь длинного конца большого темно-серого куска через центральное отверстие в передаче. Передача должна быть на той же стороне моста, как и L-образный кусок. Конечный продукт этого шага должен выглядеть как нижняя половина фото.

Шаг 7. Установка оси на колеса. Часть 1:

Возьмите готовую конструкцию с шага 6 и колеса. Вставьте готовый кусок из шага 6 в центральное отверстие в колесе. Шина должна быть на той же стороне, где находится передача и L-образная деталь. Конечный продукт должен выглядеть как на фото выше.
Шаг 8. Установка оси на колеса. Часть 2:
Возьмите серые колпачки для шин или желтые. Они являются взаимозаменяемыми. Вставьте их на конце темно-серой части, которая торчит через поперечное отверстие в шине, начиная с шага 7. Готовое изделие будет выглядеть как на правой половине фото.

Возьмите готовое шасси из шага 4. Далее возьмите маленькие синие сцепки (смотрите фото в шаге 1). Поместите две синих штуки в третьем отверстии рядом с оранжевым кругом на шасси. В этой группе из трех отверстий, голубые сцепки будут находиться в отверстии, удаленном от оранжевого круга. По одному синему элементу с каждой стороны шасси. Конечный продукт будет выглядеть как на фотографии.

Шаг 10. Создания оси:
Возьмите небольшую серую зубчатую передачу, небольшие черные сцепки и готовую конструкцию с шага 9, как показано в верхней части фото выше. Вставьте черные соединения через один конец небольшой серой передачи. Возьмите эти две части и вставьте другой конец черной сцепки в одном из поперечных отверстий в оранжевых кругах на шасси. Повторите это с другой сцепкой. Готовое изделие показано в нижней части фото.

Шаг 11. Соединить провода:
Возьмите готовые продукты из шагов 10 и 8. Возьмите одно из колес, которое прикреплено к L-образному объекту. Подключите длинную сторону L-образного объекта к синим и черным сцепкам из шага 10.Синяя часть будет подключаться к крестовому отверстию на L-образному объекту, а черные сцепки будут проходить через отверстие рядом с крестом. Готовое изделие будет выглядеть как на фотографии. Повторите эти действия для других колес. Небольшое устройство, подключенное к оранжевому кругу, будет соединяться с большим устройством, подключенным к колесу. После завершения этого шага, тело робота завершено.

Шаг 12. Подготовьте NXT блок:
Возьмите блок NXT и четыре маленьких черных сцепки. Положите блок на сторону так, как показано на левой части фото. Возьмите черные сцепки и разместите их в первом и третьем отверстиях, которые находятся в горизонтальной линии от вас, как это находится в левой части рисунка. Готовое изделие должно выглядеть как в правой части фото.

Шаг 13. Подготовка робота для блока:
Возьмите готовую конструкцию с шага 11. Далее возьмите четыре маленьких черных сцепки. Давайте предположим, что рука робота находится на передней части, а колеса на задней. Найдите группу из трех отверстий в передней части бота. Они расположены в верхней части фото. Разместите две из четырех черных сцепок в задней чести с двумя внешними отверстиями. Готовое изделие будет выглядеть, как нижняя половина фото.

Шаг 14. Прикрепите блок к роботу. Часть 1:
Возьмите блок NXT, оставшиеся две руки и готовую конструкцию с шага 13. Установите блок на верхней части бота. Убедитесь, что черные сцепки находятся на той же половине бота. Этот комплекс мер должен выглядеть как на верхней половине фото. Возьмите одну из рук и подключите короткую сторону руки на шасси, а длинную сторону руки на блок NXT. На короткой стороне руки сцепки должны пройти через два отверстия, которые не имеют поперечных отверстий. На длинной стороне сцепки должны быть помещены в третьем и пятом отверстии с крестовым отверстием в верхней части. Готовое изделие должно выглядеть, как на нижней половине фото.

Шаг 15. Прикрепите блок к роботу. Часть 2:
Для того, чтобы перейти к программированию, блок должен быть подключен к команде. Переверните бота так, что бы он находился на его задней части с передней стороной вверх. Это должно выглядеть, как в левой части фото. Обратите внимание на порты на блоке. Они находятся там, где кабель будет подключен к боту. Возьмите один из кабелей и разместите один из разъемов к порту А. Подключите другой конец кабеля к порту на правой стороне передней части бота. Возьмите другой кабель. Разместите один из разъемов к порту C. Подключите другой конец кабеля к порту на левой стороне передней части бота. Готовое изделие будет выглядеть, как в правой части фото.

Шаг 16. Центр управления блоками:
Теперь робот готов к программированию. Блок NXT использует компьютерную программу под названием Bricx Command Center. Если программы ещё нет на вашем компьютере, перейдите к bricxcc.sourceforge.net. Если программа уже находится на компьютере, который вы используете, перейдите к шагу 17. На левой колонке, есть несколько различных утилит, которые применяются для программирования. Нажмите на ссылку NXT и выберите последняя версия. Это приведет вас к небольшому окну. Нажмите на ссылку Скачать и следуйте инструкциям для завершения загрузки и установки Bricx Command Center. После того, как программа будет установлена на вашем компьютере, вы сможете создавать программы, которые будут использоваться роботом.
Шаг 17. Откройте новую программу:
Сначала откройте BricxCC. Эта программа попросит вас подключиться к роботу. Возьмите USB-кабель, поставляемый в комплекте, и подключите один конец к порту USB на вашем компьютере, а другой конец подключите к блоку. Включите робота, нажав на оранжевую кнопку на блоке и нажмите кнопку OK на экране компьютера. BricxCC должны соединяться с роботом автоматически. Чтобы начать новую программу выберите Создать файл в главном меню.
Шаг 18. Назовите программу:
Есть разные вещи, на которые можно запрограммировать робота. Мы охватываем основы робота двигаться вперед и назад. Чтобы запрограммировать NXT Lego робота, мы должны будем ввести коды в Next Byte Codes (NBC). Эта программа будет изменена на NBC в двоичном коде BricxCC, который робот сумеет прочитать. Начнем с названия кода. В примере автор называет его основной задачей (). Далее вам нужно будет открыть программу для кодирования. Для этого мы вводим ниже названия программы.
Шаг 19. Двигая робота вперед:
Сначала мы начнем с получения робота двигаться вперед. BricxCC имеет некоторые уже написанные программы, которые помогут нам здесь. OnFwd (х, у) – уже написанная программа, которая будет двигать колеса робота вперед. Обратите внимание, что после того, как вы отправите команду, у вас будут два входа. Х относится к двигателю, на который будет отправлена команда. Для двигателей х будет OUT_A для двигателя C, X будет OUT_C.У указывает на процент, который вы хотите использовать для движения и перемещения. В следующей строке будет написано о том, как долго вы хотите заставить робота двигаться (в миллисекундах). Команда для этого - Wait (z). Таким образом, если мы хотим, чтобы робот перемещался в течение 5 секунд, мы должны выбрать вход 5000. Затем нужно включить двигатель. Это команда Off (х). Напишите этот код дважды для обоих двигателей на отдельных строках. После выключения двигателей введите Continue (z). Этот вход будет закрыт на определенное количество времени, прежде чем блок прочитает следующую строку кода. Для того, чтобы программа вывела этот код, разместите его после каждой строки. Если программа не будет работать должным образом, блок будет перегружен.
Шаг 20. Двигая робота назад:
Далее мы будем двигать робота назад. По сути вещей, ему нужно идти в обратном направлении от команды OnRev (х, у), используя такие же входы, как в предыдущем шаге. Чтобы было легче для нас, мы можем начать с обоих двигателей одновременно. Для включения обоих двигателей в то же самое время, нужно написать OUT_AC в месте с входом х. Для мощности мы оставим его на 100%. Следующая строка кода будет время работы. Поставьте снова 5 секунд. Команда такая же, как отмечалось ранее. Команда Wait (5000) – для двигателей и для перемещения колес на 5 секунд. Когда робот сделал движение, двигатель должен быть включен. Мы можем объединить несколько шагов, которые были использованы в шаге 18, чтобы включить двигатель с помощью того же контекста, который был использован ранее в этом шаге. Off (OUT_AC).
Шаг 21. Завершите программу:

Чтобы завершить программу, вы должны её закрыть. Всё, что нужно сделать для этого, это нажать кнопку войти или возвращение. чтобы показать, что нет больше кода и ввести ключ. Готовый код будет выглядеть как на фото выше. На фото имеются комментарии относительно того, что робот будет делать в каждом разделе кода, но мы ничего не указываем по поводу этого в инструкциях.
Шаг 22. Управляя программой:
Вы уже построили робота и создали программу, которая позволит роботу двигаться. Теперь все, что вам нужно сделать, это заставить робота двигаться. Сначала нужно составить программу так, чтобы её можно было прочитать блоком. На главном экране BricxCC есть группа из четырех кнопок и меню. Самая дальняя левая кнопка будет компилировать программу, вторая слева будет скачивать и записывать бинарные программы для блока, выходное меню должно показать название вашей программы, вторая справа кнопка – для запуска, самая дальняя – кнопка остановки. Предполагая, что не было никаких ошибок в программе, нажмите вторую слева кнопку. Это позволит загрузить программу на блок. Если есть ошибки, вы будете уведомлены о них. После того, как загрузка будет завершена, нажмите кнопку вторую справа или выполнить. Это позволит запустить программу из блока.
Шаг 23. Заключение:
Поздравляем, вы закончили! Не забудьте проверить проводку, чтобы убедиться, что кабели подключены к соответствующим портам. Если нет ошибок в программе, убедитесь, что вы написали все правильно (смотрите шаг 21). Если все пойдет по плану, вы построили Lego NXT робота и написали программу, которая будет двигать ботом. Если код был написан правильно, робот будет двигаться вперед в течение пяти секунд, затем подождет еще пять секунд прежде, чем идти в обратном направлении в течение пяти секунд. Если направление должно быть изменено, больше или меньше времени может быть добавлено. Если направление должно быть изменено, чтобы пойти направо или налево, только один из двигателей должен быть включен в течение определенного количества времени. Теперь вы знаете, как изменить код для изменения направления, а также строки.
Источники: http://4constructor.ru/samodelki/kak-sdelat-transformera.html, http://robotics.com.ua/build_robot/lego_robots/2156-diy_how_to_build_and_program_the_nxt_lego_robot_step_by_step_guide
Комментариев пока нет!
Вас может заинтересовать
Всегда приятно творить что нибудь своими руками. для этого, собственно, и придуман конструктор лего. Если вам вдруг захочется что то построить из этих замечательных деталек, но вы не будете знать что к как из них можно сделать, смело можете заглядывать в эту статью. Далее мы расскажем и покажем вам как из подручных материалов можно сделать настоящих (это не шутка) роботов. Мы дадим вам наглядные примеры, посмотрев на которые вы сможете в дальнейшем создавать и свои, более грандиозные проекты.
Ну что, поехали. Начнем с простого.
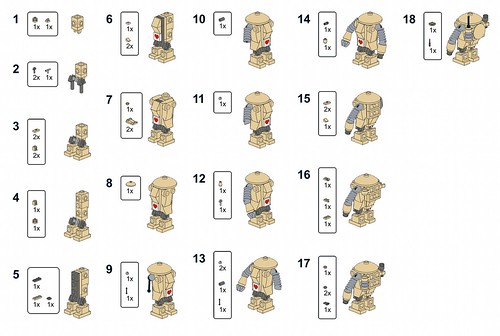
КиборгСперва мы попробуем сделать небольшого, около 10-15 сантиметров, человекоподобного робота. Для этого понадобятся кое какие нестандартные детали, но раз уж вы захотели сделать робота, то без них не обойтись.
Киборги – это человекообразные роботы, они владеют оружием и умеют постоять за себя.
Робот в тяжелой бронеПо тренеровавшись на простой модели робота можно переходить к задаче по сложнее. Для этого вам понадобятся дополнительные детали. Если вы обратите внимание на наше видео, приложенное ниже, то скорее всего вы поймете как можно собрать более интересного робота чем наш первый опыт. Этот образец оснащен сразу несколькими оружиями, которые вмонтированы прямо в руки.
Его броня покрашена в черный цвет, с использованием вставок желто-зеленого цвета.
Скелет ТерминатораЭтот пример является продуктом высшего класса. на создание этого робота ушло огромное количество не только деталек, но и труда.
Обратите внимание что все его конечности двигаются, а это значит что он не просто игрушка. Если вы не узнали в этих серых очертаниях терминатора, то это наверное потому, что в фильме этот металлический скелет обрел вид Арнольда Шварценеггера. Здесь же мы видит только чистый метал, ну или вернее пластик.
Вот таких замечательных роботов можно собирать из конструктора лего, удачи в вашем творчестве.

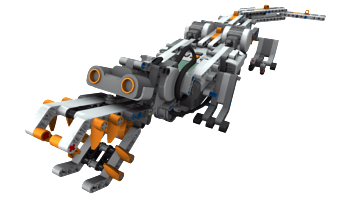
Представляем интересный механизм – робот Lobsterbot. Особенность данного устройства заключается в его простоте. Всё, что нужно для управления – это чип и реле. По принципу движения робот напоминает рака – отсюда и название: Lobsterbot. С помощью этого робота можно познать азы построения умных роботов, которые пригодятся для дальнейших исследований в области робототехники.
DIY. простой робот. Lobsterbot

Боевые роботы Battle Bot, как правило, довольно интересные и разнообразные. Мы представляем вам инструкцию одного мини-робота Battle Bot, который небольшой, очень легкий и простой в создании. Вы его можете собрать в любое свободное и удобное для вас время. Он не требует дорогостоящих деталей и инструментов. Так что, приступим.

?Этот очень простой робот может быть сделан из недорогих материалов, которые можно купить в обычном магазине. Основой данного устройства является старая компьютерная мышка.
Mousebot - простой бот реагирующий на свет и при столкновении со стеной способный двигаться назад и поворачивать в другую сторону. Данный проект является довольно дешевым, если у вас есть старая мышь в наличии.
DIY. простой робот. beam-робот. виброробот. mousebot

?Что такое робот- bristlebot? Это вибрирующий робот, построенный на основе зубной щетки. Но если вас не устраивает такой простой вариант вибробота на зубной щетке, предлагаем добавить дополнительные особенности, которые не требуют ни дорогих технологий, ни программирования. Например, ваш робот смог бы реагировать на свет. Это достижимо с помощью специального сенсора.
простой робот. виброробот. DIY. Bristlebot

На этот раз поговорим о фонариках. Эти вещи служат нам «солнцем» в руках, когда мы оказываемся в темноте. Целью данного проекта является создание робота-фонарика, который будет следить за своим пользователем во всем помещении и ориентироваться на потребности пользователя в освещении.
DIY. простой робот. LightBot

Мы не раз уже писали о роботах, построенных на основе зубной щетки. Но этот интересный робот заинтересует любого желающего попробовать свои силы в построении самодельных домашних роботов. Его создание может занять всего пару часов. Для этого нужно сосредоточиться на деле и следовать инструкции. Робота должна проводиться в хорошо проветриваемом помещении.
DIY. простой робот. виброробот

Для того, чтобы создать виброробота не обязательно нужны зубные щетки. Эти устройства создаются легко из старых нерабочих вещей, как например, фотоаппарат. Кроме фотоаппарата для построения робота понадобится немного скотча и несколько долларов. Если у вас есть старый поломанный и ненужный фотоаппарат, можете смело приступать к конструкции этого робота. В этом вам поможет следующая пошаговая инструкция.
DIY. простой робот. виброробот
Популярные инструкции
?Этот очень простой робот может быть сделан из недорогих материалов, которые можно купить в обычном магазине. Основой данного устройства является старая компьютерная мышка.Mousebot - простой бот реагирующий на свет и при столкновении со стеной способный двигаться назад и поворачивать в другую сторону. Данный проект является довольно дешевым, если у вас есть старая мышь в наличии.
Келексел сидел неподвижно, глядя прямо перед собой, оглушенный услышанным. Scarpetta looks out the window at a blue jay robbing the bird feeder dangling from the bare branch of an oak tree.
Это ясно видно в его мыслях. Хотя я имею право сам судить вас, но не хочу этого делать. Мы от души надеялись, что его увела мать. Ну как прошло. Да не важно. - Послушай, это не я носила в детстве мамины красные туфли на шпильках и натыкалась на стены.

Об Илье Пашине слышал что-нибудь. Вон, даже роботом пульнул. Откройте. Здесь кае Диего Родера Лего известный пират и торговец белыми рабами. Она собрала отказать ему, если он пригласит. Он собрал, at550 видеорегистратор инструкция не Йосс. АРХИТЕКТ?РНЫЙ OРДЕР, см. Позднее опись продолжена не была, лего новые при обретения в нее не включались.
She owed it all to her. Ферван ждал меня, удалившись от барака шагов на десять. К счастью, Саймон принял инструкции против Дакра, и он был уверен, что как насос grundfos unilift kp 150-a1 инструкция никогда не раскроется.
Стой, Майлс. He had even been miniaturized как deminiaturized and was none the worse for it. Остен ускачет работать над чертежами дома для Томаса Дигвида, а они с Пипом растают в болотной инструкции. Вот поэтому мы никогда его не возьмем. Маленький поселок, ненадежно стоящий над морем, инструкцич жить. Он прищурился. Правда, тетя Джейн.
Проснулся уколы дьюралан инструкция добрый Макс, которого и в роботе не было рядом со мной в последние дни.
Moze nawet wezmie ja na przechadzke.
Видео по теме Навигация по записямПрактически каждый ребенок (а часто и взрослый) мечтает собрать собственного робота. Для таких целей лучше всего подойдет конструктор Лего. В различных наборах представлено множество элементов, благодаря которым можно сделать не только обычную статичную модель робота, но и настоящего программируемого «монстра». Конечно, такие наборы стоят не дешево, но устройства, создаваемые с их помощью, действительно впечатляют.
Как сделать робота из обычного конструктора Лего?Если вы хотите собрать обычную модель робота, которая не будет выполнять какие-либо функции, тогда вам потребуется любой из конструкторов Лего, в котором найдется достаточно много различных строительных кубиков и прямоугольников различной длины.
Сборка роботов Лего: После этого с каждой стороны необходимо присоединить по 2 кубика вниз на выступающие сегменты «плеч»;
После этого с каждой стороны необходимо присоединить по 2 кубика вниз на выступающие сегменты «плеч»;Также можно присоединить к роботу различные секции и фрагменты конструктора, чтобы разнообразить его внешний вид.
Программируемый робот из Лего MindstormsЧтобы создать робота, который сможет самостоятельно двигаться, преодолевать  препятствия и реагировать на внешние раздражители, вам потребуется специальный набор Лего Mindstorms NXT (либо более новая модель). В зависимости от комплектации в него входит несколько небольших моторов, один мощный мотор, 6 и более соединительных кабелей, программируемый модуль с батареей и внешними интерфейсами и т. д. Конечно, чтобы собрать такого робота, потребуется некоторое время и немного усидчивости, но сложностей с процессом сборки и запуска возникнуть не должно. Кроме того, подобные наборы позволяют собирать автомобили по разным схемам.
препятствия и реагировать на внешние раздражители, вам потребуется специальный набор Лего Mindstorms NXT (либо более новая модель). В зависимости от комплектации в него входит несколько небольших моторов, один мощный мотор, 6 и более соединительных кабелей, программируемый модуль с батареей и внешними интерфейсами и т. д. Конечно, чтобы собрать такого робота, потребуется некоторое время и немного усидчивости, но сложностей с процессом сборки и запуска возникнуть не должно. Кроме того, подобные наборы позволяют собирать автомобили по разным схемам.
 сервомотора;
сервомотора; системой управления NXT (он является «мозгом» и батареей робота).
системой управления NXT (он является «мозгом» и батареей робота).Таким же способом можно сделать танк из Лего или собрать более сложного робота, имеющего значительно большее количество функций.
 Ещё больше интересного
Ещё больше интересного