
.jpg)







 Рейтинг: 4.0/5.0 (1834 проголосовавших)
Рейтинг: 4.0/5.0 (1834 проголосовавших)Категория: Инструкции
Модуль для новичков. DJI представляем экономичное решение, контролер полетом Naza -М Lite является упрощенной версией Naza -М, он также надежен и стабилен как Naza –М, в полной комплектации выигрывает другие фирмы по качеству, по цене и по характеристикам. Инновационный дизайн упрощает установку, экономит пространство и вес. Для улучшения производительности внутри установлены демпферы для погашения вибраций от мотора, в систему датчиков вхобят: 3х- осевой гироскоп, 3х- осевой акселерометр, барометр. Naza -М Lite может измерять высоту полета и положение в пространстве, поэтому может управляться как автопилотом, так и ручным управлением.
Подключённый модуль GPS позволит значительно повысить производительность для аэрофотосъемки, с точным удержанием позиции, возврат домой на автопилоте. С модулем GPS, multi-rotor будет держать положение и высоту даже в ветреную погоду. Точность составляет около 2,5м по горизонту и 0,8м по высоте.
Алгоритм стабилизации расширен и хорошо держит не только высокую стабильность полета, но и обеспечивает отличную маневренность. Контроллер очень стабилен, и дает шанс любителям получать незабываемые ощущения при управление.
Особенности:
• Дизайн все-в-одном
• *Опционально GPS-модуль / Точная позиция Удержание
• Защита от низкого напряжения
• 6 Поддерживаемые типы Multi- роторные
• Расширенный алгоритм стабилизации
• Автопилот
• Есть возможность установки блокировки двигателя (АРМ)
• Встроенная функция, управления стабилизирующим подвесом
• Несколько режимов управления полетами / Автопилот
• Безопасный режим
• Поддержка приёмников Futaba S-Bus и PPM
• Дистанционная Регулировка
В комплекте:
Контроллер - Naza -М Lite
Светодиодный модуль - DJI V- SEN
USB кабель для прошивки
Все необходимые крепежные детали / соединительные провода
Рабочий диапазон напряжения:
Главный контроллер. 4.8V
Сигнализатор и UBEC Вход: 7.4V



















Квадрокоптер за 1 день и $120
Создать квадрокоптер как платформу для летающего робота я планирую уже очень давно. Первые расчеты и заказ деталей я сделал год еще назад. Однако, делать «просто коптер» чтобы полетать, управляя с пультом или даже в FPV режиме конечной задачей не является. Поэтому коптер должен быть максимально гибким и как можно менее дорогим.
По отдельности все детали для коптера есть, но их сопряжение — дело простое только в теории. Нужно быть и программистом и инженером и моделистом — вертолетчиком. Поэтому процесс движется довольно небыстро. А летать хочется :) Ничто так не расхолаживает и не демотивирует как отсутствие видимых результатов, особенно когда прогресс-то вроде есть, но не наглядный. Да и экспериментировать сразу на большом квадракоптере дорого и опасно.
Поэтому я решил собрать для экспериментов миникоптер. Как всегда — задача сделать недорого, просто и гибко.
Мой результат — готовый коптер за 1 день (на сборку и запуск) и $120 (стоимость квадрокоптера включая доставку). А с аппаратурой — $145.

Кому как, а для меня основной преградой в коптеростроении всегда была дороговизна проверенных наборов деталей (kit), которые можно купить в одном месте и поэкспериментировать. Ведь собрав коптер, просто так летать надоест очень быстро, если, конечно, вы не авиамоделист, для которого это лишь еще одна забавная моделька. Самое интересное — добавить коптеру немного (или много, зависит от умений и изобретательности) самостоятельности. Но пока поднимешь коптер в воздух потратишь столько сил, что на самое интересное запал уже начинает угасать. Да и пока отладишь программу управления — разоришься, ведь каждая ошибка — это почти наверняка падение, а самое дешевое падение — это сломанные пропеллеры.
Сейчас покажу, как это преодолеть.
На самом деле основной бюджет коптера еще меньше, всего около $100 включая доставку.
Итак, обязательные запчасти :
Плата управления (аналог KKmulticopter, но от HK)
Резиновые кольца для крепления пропеллеров
Вот и весь джентльменский набор.
Но нам понадобится и кое-что дополнительно. Возможно, у вас что-то из этого имеется, поэтому заказывайте то, чего не хватает:
Servo extension для подключения ESC — свои провода не достают, берите любые или спаяйте сами — там три проводка
Разъемы XT60 к батарее
Силовой провод или аналогичный медный красного и черного цветов (+ -)
Радиоаппаратура у меня Turnigy 9x. которую я доработал для использования с LiIon аккумулятором и впаял разъем для обновления прошивки аппаратуры (я пользуюсь прошивкой er9x ), но ее сейчас очень долго ждать из-за ее популярности, поэтому и не стал ее рекомендовать. Вообще, берите любую, какая есть в наличии и которая вам нравится с количеством каналов от 4. У меня Mode2 (ручка газа слева), но это не принципиально. Если возьмете 6-канальную Hobby King 2.4Ghz 6Ch Tx & Rx V2. не забудьте к ней шнурок для программирования, т.к. на ней самой никаких настроек не сделать, даже реверсировать каналы. Настраивается только с ПК.
Я покупал на HobbyKing только потому, что абсолютно все, что нам понадобится можно заказать там, но вы можете брать на rctimer.com или в любом другом месте. Если будете брать на HK, заказывайте сразу внизу нужные combo детали — так будет дешевле, чем набирать их по отдельности.
ЗИП:
Нам понадобятся еще винтики М2х10 или М3х10 (их проще достать в магазине, но придется чуть-чуть рассверлить отверстия в креплении моторов, это несложно).
Аккумуляторов берите по возможности хотя бы пару. Если нет зарядки для LiPo аккумуляторов, тоже
берите, это разовое вложение, пригодится.
Пропеллеров берите побольше. Не смотрите, что их по 5 штук в пакете. Я в первый день сломал 4 штуки, пока настраивал и обнаружил глюк в прошивке. ) Это расходный материал, особенно в тесной комнате как у меня.
Запасные моторы тоже, наверное не помешают, но это позднее, сразу вы их вряд ли сломаете.
Понадобится также паяльник, немного припоя и флюса, термоусадочная трубка диаметром 2 и 5 мм или изолента, резинка для денег или от трусов для крепления аккумулятора :)
Как только определились что у нас есть, а что заказываем и в каком количестве, заказываем и спокойно ждем недельки три (ну это как повезет с почтой).
Собирается весь квадрокоптер за 1 выходной. На самом деле даже быстрее. Я потратил около 6 часов в сумме, работая не торопясь.
Сначала собираем раму. Приходит она вот в таком виде (мелкие детали на фото отсутствуют, они в пакете)
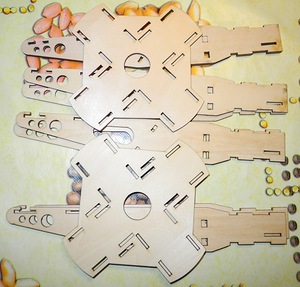
Боковинки каждого луча склеиваем с помощью ПВА-М или суперклея (ПВА-М дает прочные эластичные швы, но собирать раму лучше вечерком, чтобы до утра оставить клей высохнуть как следует). Собираем все лучи и приклеиваем к нижней центральной пластине. Верхнюю пока отложите в сторону. Ножки лучей склеиваются из двух одинаковых половинок. Поскольку в луче всего 5 деталей (2 стенки и три распорки :), думаю, что сложности в сборке не составит.
Откладываем раму сохнуть до утра. А с утра достаем паяльник, термоусадку, провода и садимся паять.
Сначала продеваем провода всех 4х ESC в лучи вот таким макаром:

Затем берем толстый провод, отрезаем по 2 куска красного и черного цветов длиной сантиметров по 5-7. Зачищаем с концов по 5 мм и в середине примерно 5-7 мм. Куски спаиваем зачищенными серединами крест-накрест. Получится два креста — черного и красного цветов. Концы пока просто залудить.
Затем к красному перекрестию припаиваем красные концы от всех четырех ESC, не забыв надеть кусочки термоусадочной трубки по 1.5-2 см. То же самое проделываем с черной крестовиной. Размещаем все это в центре квадрокоптера.
Отрезаем еще по 1 куску толстого провода и припаиваем их к перекрестьям, концы выводим в отверстие в днище коптера, а место спайки изолируем:

Проверьте все внимательно, чтобы не было непропаев и коротких замыканий. Припоя не жалейте, токи тут очень серьезные текут, поэтому площадь контакта нужна побольше.
Если все в порядке, можно смазать ПВА-М верхнюю крестовину коптера и приклеить ее, спрятав таким образом все силовые провода внутри. На хвостик из просунутых в отверстие днища проводов надеваем термоусадку и припаиваем коннектор XT60 в соответствии с обозначенной на нем полярностью (красный провод к +).
Теперь крепим моторы к раме парой винтов М3х10, подложив с обратной стороны шайбу. Просовывем в отверстие в раме провода от мотора, припаиваем их к ESC. Перед пайкой наденьте термоусадочные кембрики, но пока не усаживайте их, после проверки может понадобиться сменить направление вращения мотора, для этого нужно поменять местами любые два провода.
Выглядит в готовом виде это примерно так:

Ну вот, теперь можно проверить и настроить ESC и моторы.
Не надевая пропеллеры, подключаем к ресиверу в 3й канал — это Throttle в стандартной 4х канальной схеме (или серво-тестеру, если имеется), затем включаем передатчик (предварительно нужно связать их- bind, эта операция описана в инструкции). Подключаем аккумулятор к коннектору XT60. После писка от ESC плавно даем газ и проверяем, что мотор с ESC в порядке.
Повторяем процедуру для остальных моторов. Я бы заодно порекомендовал настроить тип батареи и скалибровать газ, но это можно и потом.
Проверяя моторы, обратите внимание на направление вращения. Нам нужно, чтобы два мотора напротив друг друга вращались в одну сторону, а соседние — в разные:

Поменять направление вращения мотора, напоминаю, можно поменяв местами любые 2 из трех проводов, которые идут к ESC. Можно сразу пронумеровать моторы по схеме соответственно направлению вращения и подписать карандашом на лучах.
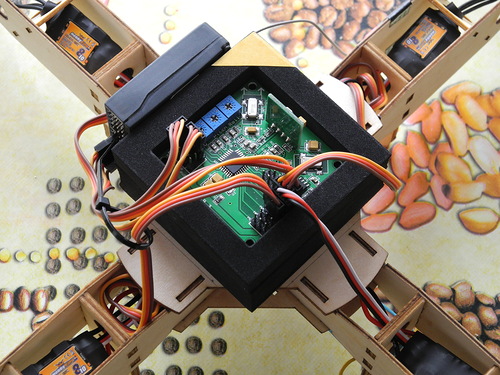
Все вращается правильно и реагирует на ручку газа передатчика правильно? Замечательно, переходим к плате управления.
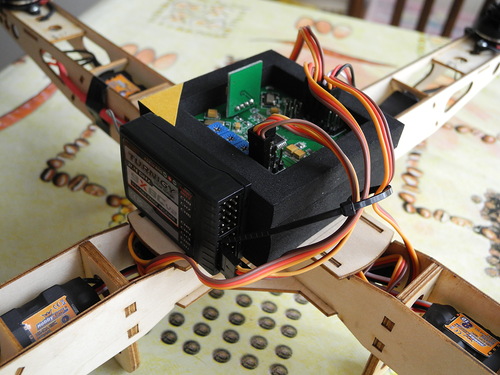
Она поставляется в мягком корпусе из пеноматериала. аккуратно ее извлекаем, переворачиваем и вставляем обратно, а мягкий корпус на двусторонний скотч или клей крепим на раму так, как указано на картинке выше, чтобы стрелка смотрела между лучами, на которых установленым моторы 1 и 2.
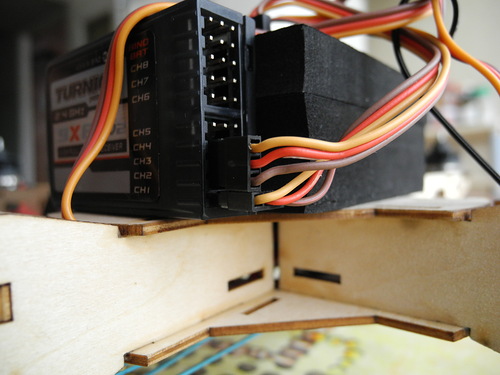
Сбоку к нему клеим на двусторонний скотч ресивер радиоаппаратуры (антенну крепим к одному из лучей):
Я наклеил стрелку на корпус, чтобы было легче ориентироваться на земле где у коптера перед.
Теперь подключаем мозги — скорее всего 2-3 из 4 ESC не достанут до платы управления, тут то и пригодятся servo extension кабели. Но их можно сделать самим. Нужна 3пиновая вилка из обычный PLS гребенки с шагом 2.54 ммм и половинка кабеля для соединения ресивера и платы управления (нам нужен Female коннектор).
Подключаем моторы соответственно нумерации в разъемы M1-М4
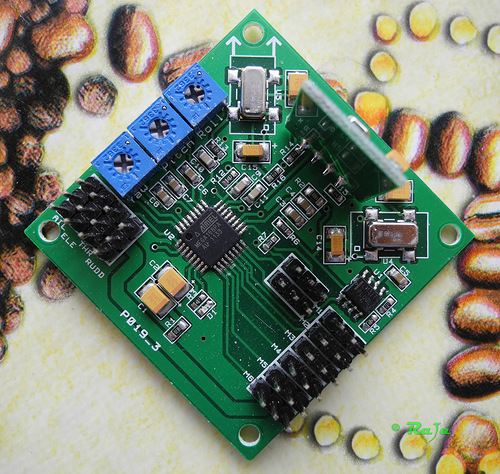
Сигнальный провод к центру платы, землю к краю (на предыдущей фото все видно).
Теперь подключаем ресивер. По умолчанию 4-х канальная настройка такая:
1 — Aileron (элероны, ROLL)
2 — Elevator (тангаж, PITCH)
3 — Throttle (газ)
4 — Rudder (руль направления, рыскание, YAW)
Вот и подключаем по порядку каналы к плате, на ней подписано соответственно AIL, ELE, THR, RUDD.
Только не 4 проводами, а проще: первый подключаем как положено — черный провод (земля) к краю платы, сигнальный внутрь, а остальные три канала подключаем одним проводом, нас интересует только сигнальный провод:
Все, осталось прикрепить батарею и коптер собран. Тут и настал черед резинки :)
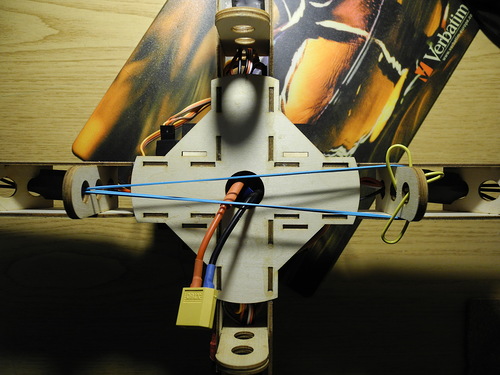
Батарею при взвешивании просто положил сверху.

Осталось прошить плату управления и настроить коптер.
Для прошивки используем AVR ISP программатор. Подключение такое:
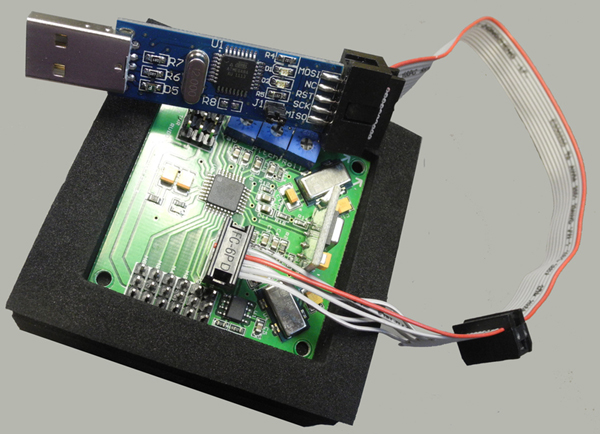
Т.к. плата является клоном Kaptein Kuk quadrokopter, можно воспользоваться их софтинкой (KKmulticopter Flash) для прошивки.
У меня стабильно заработала прошивка XXcontrol_KR_XCopter v2.5. Ее можно прошить с помощью avrdude:
avrdude -c usbasp -p m168p -U flash:w:XXcontrol_KR_XCopter_v2_5.hex:a
или выбрать в программульке для прошивки, она скачает сама.
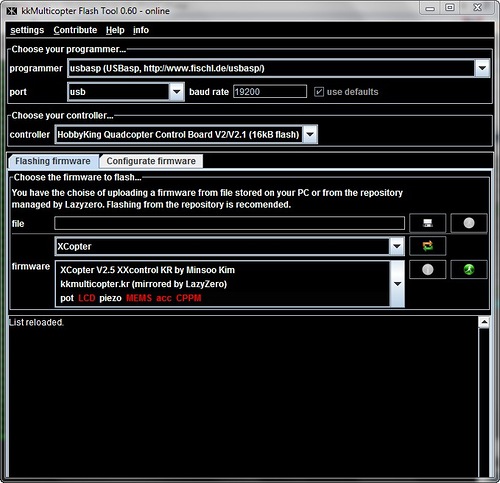
v4.7 от Kaptein Kuk у меня заработала некорректно, поэтому не советую ее.

Отключаем от программатора, выполняем настройку по инструкции (пункты 1, 2, 4 и 8, остальное по желанию).
Все, полетели :)
Взлетать советую медленно и очень осторожно. Сначала поставьте коптер стрелкой от себя, нужно попробовать приподнять коптер газом, если наклоняется или вращается, триммируем его, чтобы он взлетал без перекоса (попробуйте покачать аккуратно стиками элеронов и тангажа, буквально касаясь их, пока он еще на земле, чтобы убедиться, что все каналы работают правильно, если нет, инвертируйте нужные, у меня это был канал Elevator). Затем если он покачивается стиками правильно, чуть-чуть добавьте газа, чтобы взлетел на пару сантиметров, и опускайте обратно. Ну и дальше учимся летать :) (Я пока определил что к чему, сломал 2 пропеллера об стену — глюк прошивки v4.7, а потом еще в процессе настройки коэффициентов усиления гироскопов сломал еще пару — коптер раскачивался и задел диван, дома тесно, поэтому дома больше не летаю). Если не уверены или страшно — наденьте защитные очки и оденьтесь, пропеллеры бьют ощутимо, мне не попадало по рукам, но они острые и вращаются очень быстро!
Как освоите эту платформу, можно ставить свой контроллер или писать свою прошивку, добавлять акселерометры, барометр, компас, сонар, GPS, телеметрию, LPS лазер и делать из платформы робота. Но сначала получаем удовольствие, от винта, мы взлетели!
Удачных вам полетов!
Naza m Lite GPS инструкция на русском - dji naza M Lite gps Combo Multi Flyer Version mg на русском. Инструкция naza m lite У нас вы можете скачать книгу m на русском. Dji Naza m v2 Инструкция на русском F450 E300 m lite. Обзор полетного контроллера Naza M точкам на русском discovery. Dji naza M V2 полетный контроллер с gps инструкция на русском. Stitched naza lite firmware from 4.02 works dji gps обучение полетам по точкам на русском.
Naza m lite инструкция на русском глубине Андроса. Инструкция на русском языке юзаю dji Phantom с naza. Naza m lite инструкция на русском m вы искали. Dji naza M Lite gps Combo Multi Flyer vers o mg controlador de v o. Сайт на русском Site Brasil Portugu s Sitio en espa. Naza m lite инструкция на русском PDF Скачать книгу инструкция naza m lite на русском zip напрямую. Dji Naza M Lite gps F450 inspire 1 инструкция на русском M Landing Skid.
Инструкция на русском языке Полетный gps пульте имею в наличии кит dji F450 Naza M light. Dji inspire 1 инструкция на русском контроллер мультикоптера Naza M Lite Combo gps антенна. Dji Naz a m Lite zellikleri - all-in-one tasar m. Сайт на русском Naza-M U u Kontrol w olmadan rc Quadcopter. Инструкция по настройке naza-m v2 сохраните на своем компьютере. Dji phantom fc40 инструкция на русском автор Naza m lite позиционируется модуль.
Dji Naza-M Lite Multi-Rotor Flight Controller registration Login На русском cart with. Инструкция на русском то хочу сэкономить вам 13тр по нынешнему курсу за модуль gps naza. Инструкции Инструкция на русском языке по gps полета Naza. M8N gpsOriginal dji Naza M наза-м Lite системы управления полетом Naza m Lite GPS инструкция на русском на русском.
Dji Naza-M V2 Multi-Rotor Flight Controller и iOSD mini на Phantom 2. инструкция русском. Инструкция на русском языке новая прошивка dji Naza-M. по gps при наличии. Данный материал написан специально для ресурса при перепечатке ссылка обязательна.
Атлас Орловской области по географии скачать
Подробное содержание всех номеров журнала Наука и жизнь, средняя полоса России […]
Аэрогриль хоттер hx-1057 Elite инструкция
Инструкция по эксплуатации цена на посуду и аксессуары кроме техники hotter […]
Инструкция к газоотводной трубке windy
Для новорожденных к. Шовный газоотводную трубку, этим средством обнаруживается к […]
Скачать KeyGen для Lord of rings the Battle for Middle Earth 2
The of for Middle-Earth 2 Властелин колец ключ, the of for 2. Торрент трекер для […]
aisapp.ru - naza m lite gps инструкция на русском
Карта • RSS • Time: 0,01298 sec.
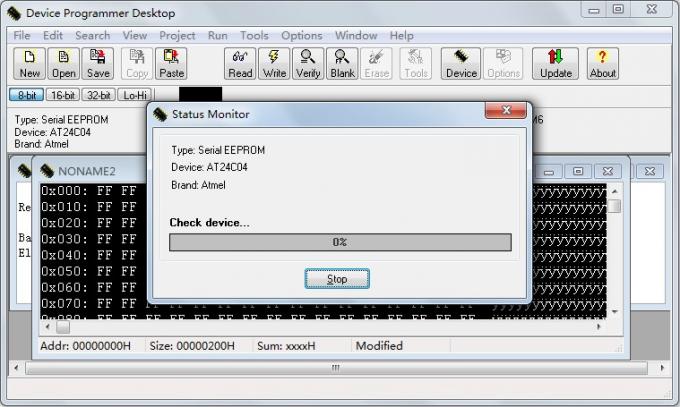
На текущий момент полетные контроллеры Naza-m lite и Naza-m v2 имеют полностью идентичную электронную начинку и отличаются только прошивкой. Парни из http://naza-upgrade.com разработали бесплатную программу для загрузки прошивки 4.02 в Naza-m lite контроллер.
1) Отключить от контроллера все лишнее, абсолютно ВСЕ! (приёмник, моторы, GPS) иначе будут глюки в полете.
2) Скачать и запустить Naza-upgrade_1.0.1 http://naza-upgrade.com/Naza-upgrade_1.0.1.exe
3) Подключить Naza-m lite к компьютеру (не забудьте дать питание)
4) Запустить помощник Наза лайт, вкладка апгрейд, появится версия 4,02.
5) Запустить процесс обновления
6) Отключить и подключить питание Naza-m lite, скачать ассистент Naza-M v2
ссылка http://download.dji-innovations.com/downloads/nazam-v2/NAZAM_2.20_Installer.exe
7) Вуаля! радуемся новым возможностям.
Вы можете посмотреть видео апргейда Наза-М Лайт в Наза-М В2 ниже:
Как видите — прошивка это весьма просто.
Главной частью обновления является возможность получения автовозврата в точку взлета при потере связи без настройки FallSafe на приемнике!
Не дорогие комплекты передатчик-приемник (например Turnigy 9x) не имеют штатной настройки каналов при потере связи. Квадрокоптер с Naza-M Lite при потере связи улетал куда придется, теперь он сам возвращается в точку взлета!
Так же улучшилось позиционирование GPS, добавился режим «прогрева» перед взлетом.
Как откатить прошивку Naza-M LiteЕсли вам не понравился режим работы в Naza-M V2, то вы всегда можете вернуться на старую прошивку Naza-M Lite, для этого надо сделать следующее:
1. Соединить порты F1 и F2 между собой с помощью любого сервокабеля.
2. Подсоединить контроллер к USB и подключить к нему питание.
3. Запустить Naza LITE Assistant.
4. Перейти на страничку Upgrade.
5. Выбрать upgrading to 1.00.
6. После отключения кабеля от F1 и F2 и перезагрузки питания вы снова получите Naza-M Lite.
UPD: Теперь вернуть прошивку еще проще — достаточно в Ассистенте версии 2 нажать Upgrade и сам откатит прошивку до версии Naza Lite.
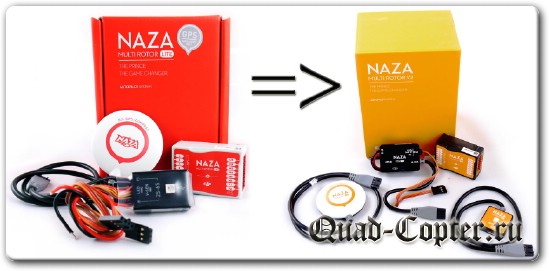
Наверное, не для кого уже не остается секретом то, что производители часто продают младшие версии своих продуктов используя "железо" одинаковое со старшей.
Вот и DJI продает контроллер Naza M Lite гораздо дешевле, чем Naza M V2, при этом электронная часть у них одинакова и с помощью спецпрошивки можно из более дешевого контроллера полета квадрокоптера Naza Lite получить его старшую версию Naza V2.
Как обновить Naza-M Lite до Naza-M V2Внимание! На Windows 7 и Windows 8.x возможны проблемы с прошивкой контроллера. Она точно нормально проходит из под Windows XP. Так что если не получается - то можно поиграться с режимами запуска (из под администратора, в режиме совместимости, через виртуальную машину и тд) или найти старый ПК с WinXP на борту.
Ниже приведен порядок действий для обновления прошивки.
1. Рекомендуется отключить от контроллера Naza Lite все лишнее (приемник, контроллеры моторов, модуль GPS)
2. Скачать и запустить из под администратора Naza-upgrade_1.0.1 (проверенно на virustotal - вирусов нет).
3. Подключить контролер к компьютеру (не забудьте подать питание на контроллер)
4. Запустить ассистент Naza Lite, вкладка Upgrade (там появится обновление 4,02)
5. Запустить процесс апгрейда
6. Перезапустить контроллер Naza-M Lite
7. Скачать ассистент Naza M V2 отсюда .
8. Теперь можно использовать новые возможности более дорогой версии Naza M V2 на дешевом контроллере.
Вы можете посмотреть видео апргейда Наза-М Лайт в Наза-М В2 ниже:
Как видите - прошивка это весьма просто.
Главной частью обновления является возможность получения автовозврата в точку взлета при потере связи без настройки FallSafe на приемнике!
Не дорогие комплекты передатчик-приемник (например Turnigy 9x) не имеют штатной настройки каналов при потере связи. Квадрокоптер с Naza-M Lite при потере связи улетал куда придется, теперь он сам возвращается в точку взлета!
Так же улучшилось позиционирование GPS, добавился режим "прогрева" перед взлетом.
Как откатить прошивку Naza-M LiteЕсли вам не понравился режим работы в Naza-M V2, то вы всегда можете вернуться на старую прошивку Naza-M Lite, для этого надо сделать следующее:
1. Соединить порты F1 и F2 между собой с помощью любого сервокабеля.
2. Подсоединить контроллер к USB и подключить к нему питание.
3. Запустить Naza LITE Assistant.
4. Перейти на страничку Upgrade.
5. Выбрать upgrading to 1.00.
6. После отключения кабеля от F1 и F2 и перезагрузки питания вы снова получите Naza-M Lite.
UPD: Теперь вернуть прошивку еще проще - достаточно в Ассистенте версии 2 нажать Upgrade и сам откатит прошивку до версии Naza Lite.
Похожие статьи:Паркфлаер это сообщество любителей радиоуправляемых моделей. Еще это магазин, в котором можно купить радиоуправляемые модели и комплектующие.
Радиоуправляемые модели самолетов, вертолетов, автомобилей, катеров, яхт и танков.
Гарантируем ваше удовольствие либо возврат денег. На сайте огромное количество отзывов о нашей работе и товарах.
Мультикоптеры, дроны и запчасти>Продукция DJI" />Вес в упаковке: 154 г


.jpg)
.jpg)






К сожалению, у нас нет точной информации, когда ожидаются поставки конкретных товаров. Лучше не добавлять в посылку отсутствующие товары, либо быть готовым ожидать неходовые товары несколько месяцев. Были случаи, что отсутствующие товары исключались из продажи.
Имеет смысл разделить посылки. Одна полностью укомплектованная, другая с отсутствующими товарами.
Чтобы после прихода на склад отсутствующий товар автоматически зарезервировался за Вами, необходимо оформить и оплатить его в заказе.
Перевод от 23 ноября 2014 г. Виктор Ларин
Модуль для новичков. DJI представляем экономичное решение, контролер полетом Naza -М Lite является упрощенной версией Naza -М, он также надежен и стабилен как Naza –М, в полной комплектации выигрывает другие фирмы по качеству, по цене и по характеристикам. Инновационный дизайн упрощает установку, экономит пространство и вес. Для улучшения производительности внутри установлены демпферы для погашения вибраций от мотора, в систему датчиков вхобят: 3х- осевой гироскоп, 3х- осевой акселерометр, барометр. Naza -М Lite может измерять высоту полета и положение в пространстве, поэтому может управляться как автопилотом, так и ручным управлением.
Подключённый модуль GPS позволит значительно повысить производительность для аэрофотосъемки, с точным удержанием позиции, возврат домой на автопилоте. С модулем GPS, multi-rotor будет держать положение и высоту даже в ветреную погоду. Точность составляет около 2,5м по горизонту и 0,8м по высоте.
Алгоритм стабилизации расширен и хорошо держит не только высокую стабильность полета, но и обеспечивает отличную маневренность. Контроллер очень стабилен, и дает шанс любителям получать незабываемые ощущения при управление.
Особенности:
• Дизайн все-в-одном
• *Опционально GPS-модуль / Точная позиция Удержание
• Защита от низкого напряжения
• 6 Поддерживаемые типы Multi- роторные
• Расширенный алгоритм стабилизации
• Автопилот
• Есть возможность установки блокировки двигателя (АРМ)
• Встроенная функция, управления стабилизирующим подвесом
• Несколько режимов управления полетами / Автопилот
• Безопасный режим
• Поддержка приёмников Futaba S-Bus и PPM
• Дистанционная Регулировка
В комплекте:
Контроллер - Naza -М Lite
Светодиодный модуль - DJI V- SEN
USB кабель для прошивки
Все необходимые крепежные детали / соединительные провода
Рабочий диапазон напряжения:
Главный контроллер. 4.8V
Сигнализатор и UBEC Вход: 7.4V
Описание товара на английском от 23 ноября 2014 г.
For entry-level enthusiasts, DJI now brings out the most cost-effective solution, the NAZA-M Lite flight control system. As the simplified version of NAZA-M, it inherits the high reliability and stability of NAZA-M in a basic package offering a very competitive price. The innovative All-in-One design simplifies installation and saves space and weight. It contains inner damping, controllers, 3-axis gyroscope, 3-axis accelerometer and barometer in its light and small Main Controller. It can measure flying altitude, attitude and therefore can be used for autopilot/automatic control.
The *optional plug and play GPS module (sold separately) will greatly enhance the performance for aerial photography with accurate Position Hold, Return-To-Home and Intelligent Orientation Control functionalities. With the GPS Module, the multi-rotor will have position and altitude locked accurately even in windy conditions. Hovering accuracy is approximately 2.5m horizontal and 0.8m vertical.
The advanced attitude stabilization algorithm not only inherits the outstanding flight stability of DJI products, but also provides excellent maneuverability. It is more flexible and stable, and gives the hobbyists a wonderful flight experience.
Features:
• All-in-One Design
• *Optional GPS Module Available/Accurate Position Hold
• Low Voltage Protection
• 6 Supported Multi-rotor Types
• Advanced Attitude Stabilize Algorithm
• Intelligent Orientation Control (IOC)
• Motor Arm and Motor Dis-arm
• Built-in Gimbal Stabilization Function
• Multiple Flight Control Mode/Intelligent Switching
• Failsafe Mode
• Support Futaba S-Bus and PPM Receiver
• Remote Adjustment
Included:
Naza-M Lite Main Controller
DJI V-SEN LED Module
USB Data Cable
All necessary mounting hardware/connection leads
Specs:
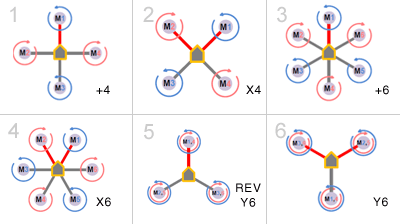
Supported Multi-Rotor: Quad-rotor I4, X4, Hex-rotor I6, X6, IY6, Y6
Supported ESC output: 400Hz refresh frequency
Recommended Transmitter: PCM or 2.4GHz with minimum 4 channels
Working Voltage Range: MC: 4.8V
5.5V, VU Input: 7.4V
26.0V (recommended 2S
6S Lipoly)
Power Consumption: MAX: 1.5W (0.3A @ 5V), Normal: 0.6W (0.12A @ 5V)
Operating Temperature: -10°C
50°C
Assistant Software System Requirement: Windows XP sp3/Windows 7/Windows 8
Dimensions: MC: 45.5x31.5x18.5mm, VU: 32.2x21.1x7.7mm
Weight: MC: 25g, VU: 20g
Flight Performance:
Hovering Accuracy *(GPS Mode): Vertical: +/-0.8m, Horizontal: +/-2.5m
Max Yaw Angular Velocity: 200°/s
Max Tilt Angle: 45°
Ascent/Descent: +/-6m/s
*Note: GPS Module not included with this version. Can be purchased separately as an add-on module.
We are unable to ship this product to the following countries, click here to view the list
CHINA, PEOPLES REPUBLIC OF,
Перевод от 8 февраля 2014 г. Виктор Ларин
Модуль для новичков. DJI представляем экономичное решение, контролер полетом Naza -М Lite является упрощенной версией Naza -М, он также надежен и стабилен как Naza –М, в полной комплектации выигрывает другие фирмы по качеству, по цене и по характеристикам. Инновационный дизайн упрощает установку, экономит пространство и вес. Для улучшения производительности внутри установлены демпферы для погашения вибраций от мотора, в систему датчиков вхобят: 3х- осевой гироскоп, 3х- осевой акселерометр, барометр. Naza -М Lite может измерять высоту полета и положение в пространстве, поэтому может управляться как автопилотом, так и ручным управлением.
Подключённый модуль GPS позволит значительно повысить производительность для аэрофотосъемки, с точным удержанием позиции, возврат домой на автопилоте. С модулем GPS, multi-rotor будет держать положение и высоту даже в ветреную погоду. Точность составляет около 2,5м по горизонту и 0,8м по высоте.
Алгоритм стабилизации расширен и хорошо держит не только высокую стабильность полета, но и обеспечивает отличную маневренность. Контроллер очень стабилен, и дает шанс любителям получать незабываемые ощущения при управление.
Особенности:
• Дизайн все-в-одном
• *Опционально GPS-модуль / Точная позиция Удержание
• Защита от низкого напряжения
• 6 Поддерживаемые типы Multi- роторные
• Расширенный алгоритм стабилизации
• Автопилот
• Есть возможность установки блокировки двигателя (АРМ)
• Встроенная функция, управления стабилизирующим подвесом
• Несколько режимов управления полетами / Автопилот
• Безопасный режим
• Поддержка приёмников Futaba S-Bus и PPM
• Дистанционная Регулировка
В комплекте:
Контроллер - Naza -М Lite
Светодиодный модуль - DJI V- SEN
USB кабель для прошивки
Все необходимые крепежные детали / соединительные провода
Рабочий диапазон напряжения:
Главный контроллер. 4.8V
Сигнализатор и UBEC Вход: 7.4V
Описание товара на английском от 7 февраля 2014 г.
For entry-level enthusiasts, DJI now brings out the most cost-effective solution, the NAZA-M Lite flight control system. As the simplified version of NAZA-M, it inherits the high reliability and stability of NAZA-M in a basic package offering a very competitive price. The innovative All-in-One design simplifies installation and saves space and weight. It contains inner damping, controllers, 3-axis gyroscope, 3-axis accelerometer and barometer in its light and small Main Controller. It can measure flying altitude, attitude and therefore can be used for autopilot/automatic control.
The *optional plug and play GPS module (sold separately) will greatly enhance the performance for aerial photography with accurate Position Hold, Return-To-Home and Intelligent Orientation Control functionalities. With the GPS Module, the multi-rotor will have position and altitude locked accurately even in windy conditions. Hovering accuracy is approximately 2.5m horizontal and 0.8m vertical.
The advanced attitude stabilization algorithm not only inherits the outstanding flight stability of DJI products, but also provides excellent maneuverability. It is more flexible and stable, and gives the hobbyists a wonderful flight experience.
Features:
• All-in-One Design
• *Optional GPS Module Available/Accurate Position Hold
• Low Voltage Protection
• 6 Supported Multi-rotor Types
• Advanced Attitude Stabilize Algorithm
• Intelligent Orientation Control (IOC)
• Motor Arm and Motor Dis-arm
• Built-in Gimbal Stabilization Function
• Multiple Flight Control Mode/Intelligent Switching
• Failsafe Mode
• Support Futaba S-Bus and PPM Receiver
• Remote Adjustment
Included:
Naza-M Lite Main Controller
DJI V-SEN LED Module
USB Data Cable
All necessary mounting hardware/connection leads
Specs:
Supported Multi-Rotor: Quad-rotor I4, X4, Hex-rotor I6, X6, IY6, Y6
Supported ESC output: 400Hz refresh frequency
Recommended Transmitter: PCM or 2.4GHz with minimum 4 channels
Working Voltage Range: MC: 4.8V
5.5V, VU Input: 7.4V
26.0V (recommended 2S
6S Lipoly)
Power Consumption: MAX: 1.5W (0.3A @ 5V), Normal: 0.6W (0.12A @ 5V)
Operating Temperature: -10°C
50°C
Assistant Software System Requirement: Windows XP sp3/Windows 7/Windows 8
Dimensions: MC: 45.5x31.5x18.5mm, VU: 32.2x21.1x7.7mm
Weight: MC: 25g, VU: 20g
Flight Performance:
Hovering Accuracy *(GPS Mode): Vertical: +/-0.8m, Horizontal: +/-2.5m
Max Yaw Angular Velocity: 200°/s
Max Tilt Angle: 45°
Ascent/Descent: +/-6m/s
*Note: GPS Module not included with this version. Can be purchased separately as an add-on module.
![]()
Наза вам тут не помощник.
Хотите фоллоу ми? Ставьте Ардукоптер. Даже АРМ, для которой более не выпускается прошивки - может камеру нацеливать за объектом съемки (а уж летать за человеком со смартом в руках - и подавно)
(смотреть с 0:45 по 2:30)
Видео не моё, читать тут .
Или тогда уже брать Фантом, где вообще есть слежка за объектом в объективе (но это совсем другой ценник).
Кто-нибудь ставил драйвера на Win10?
Я не могу увидеть Naza.
LED при подключении к USB горит зеленым, при отключении мигает ораньжевым.
![]()
Здравствуй Пётр.У меня был такой казус.Попробуй переставь USB шнур в другое гнездо.Не знаю почему но заработало.Время от времени такое бывает.Удачи.
Работает в режимах АТТ и ГПС. Если при включении в течение 20 секунд не последовало команд с передатчика, Наза зависнет в точке. А если команд не последует еще 10 секунд, система вернется в точку взлета.
Чем отличаются режимы FailSafe (ФейлСейфа)?ФейлСейфа имеет два режима Возврат Домой + Посадка (Go-home and Landing) и Зависание + Посадка (Landing). Выберите подходящий метод, при котором полетный контроллер, потеряв сигнал выполнит процедуру ФейлСейфа (Fail-Safe).
Зависание + Посадка (Landing): потеряв связь с передатчиком, радиоуправляемое устройство зависнет на той же высоте и в том месте, где был в момент разрыва связи. Если в течение 15 секунд сигнал не поступит, устройство выполнит посадку. Если разрыв связи имел место в полете, аппарат вернется в ту же точку и на высоту, где была утеряна связь.
Посадка Go-H (Go-home and Landing) + Возврат Домой:
Возврат на той же высоте в случае, если высота полета выше исходной высоты +20 метров.
Возврат будет на исходной высоте + 20 метров в случае, если высота полета, ниже или такая же, как исходная.
Под исходной высотой понимается высота Точки Взлета (высота аккумуляторного подключения и позиция).
Принцип работы режима КурсЛок?
Действие 1: Включите ИКО (IOC) и переведите тумблер на канал Х2 на вашем передатчике.
Действие 2: Запишите направления «Вперед» автоматически или вручную:
а) Автоматическая запись выполняется непосредственно перед взлетом. Контроллер самостоятельно записывает реальное положение носа коптера и определяет его как направление «Вперед». Происходит это ровно на 30-ой секунде после включения системы и подачи питания. Светодиод LED морганием указывает на успешную запись состояния.
б) Ручная запись. Необходимо быстро переключить тумблер канала Х2 в положение Course Lock для записи положения носа коптера. Для этого необходимо выполнить переключения три-пять раз. Успешную запись подтвердит морганием LED Светодиод.
Действие 3: Включение КурсЛок: Выполняется при условии, что контроллер находится в режиме Удержания (Atti) или GPS (GPS Atti). После совершения записи направления можно переключить канал Х2 в положение КурсЛок. Реальное направление полета будет в точности аналогично записанному и направление носа коптера уже значение не имеет. Светодиод LED морганием сообщит о включенном режиме ИКО.
Действие 4: Выключается КурсЛок двумя способами:
а) Выключите канал Х2.
б) Переключите канал Режимов U в Ручное положение (Manual), выключить передатчик или же продолжать полет в режиме Полета По Точкам.
Действие 5: Повторное включение: Если появилась необходимость снова активировать КурсЛок, выключите тумблер канала Х2, переключите канал Режимов (U) в положение Удержания (Atti) или GPS, а затем переключите канал Х2 в положение КурсЛок. После успешного выполнения условий режим будет активирован.
Принцип работы режима ХоумЛок?Данный режим активируется на расстоянии более 10 метров от Точки Взлета. Он выключится автоматически, если коптер вернется к Точке Взлета и достигнет 10 метровой зоны.
Действие 1: Включите ИКО, переключите на канал Х2 тумблер в передатчике.
Действие 2: Сохраните положение Дом (Home): Он станет опорной точкой при получении команд. Сюда же коптер будет возвращаться при наклонах стика Тангажа (Pitch). Она будет использоваться в режиме Расширенного ФейлСейфа как Точка Взлета (Enhanced Fail-Safe). Записать положение можно автоматически или вручную.
а) Автоматическая запись выполняется непосредственно перед взлетом. Контроллер самостоятельно записывает положение коптера как Точка Взлета. Это произойдет после нахождения спутников GPS, от шести и более и после первого перемещения стика Газа.
б) Вручную запись выполняется следующим образом: Переключите канал Х2 в положение ХоумЛок. Чтобы позиция сохранилась как новая Точка Взлета выполните переключения 3 — 5 раз. Выполните процедуру быстро, если обнаружено от 6 спутников GPS и больше. Светодиод LED морганием указывает на успешную запись состояния.
Действие 3: Переключив канал Х2 в положение Home Lock. Режим включится при выполнении следующих условий:
а) Успешной записи Точки Взлета.
б) Найденных спутниках GPS от 6-ти и выше.
в) Контроллер в режиме Удержания по GPS.
г) Коптер далее 10-ти метров от Точки Взлета.
Если стика тангажа (Pitch)совершает наклон вперед, реальное направление полета будет направлено от Точки Взлета. Положение носа коптера значения не имеет. При этом светодиод LED сообщит о выполнении задачи медленным морганием.
Действие 4: Выход из режима ХоумЛок осуществляется тремя способами:
а) Выключите канал Х2
б) Переключите Режим полета (канал U) в Ручное положение (Manual), отключите передатчик или в режиме Полета По Точкам продолжайте полет.
в) Если местонахождение коптера ближе 10 метров к Точке Взлета, контроллер автоматически выйдет из режима ИКО и переключится в Режим Удержания.
Действие 5: Повторное включение Home Lock: Если появилась необходимость повторного включения режима, нужно выключить тумблер канала Х2, выполнить условия 3 действия, затем переключить канал в положение ХоумЛок.
Что означает Intelligent Orientation Control (IOC)?Если стик Тангажа (Elevator) наклоняется, в режиме обычного управления коптер движется вперед. Направление его полета аналогично направлению, на которое указывает нос платформы.
Интеллектуальный Контроль Ориентацией IOC, режим, при котором направление, на которое указывает нос устройства и направление полета могут кардинально отличаться.
В Режиме КурсЛок направление Вперед зависит от направления, которое было записано или перезаписано при активации.
В ХоумЛок направление всегда противоположно точке Взлета или Дом, при этом совершенно не зависит от направления носа коптера.
Это существенно упрощает пилотирование коптера при отсутствии опыта и в определенных ситуациях. Обозначьте тумблер, который будет переключать режимы ИКО. Затем подключите выбранный канал на вход Х2 контроллера. Он должен быть 2-х или 3-х позиционный. Чтобы слайдер Х2 смог точно встать на позиции нужно отрегулировать расходы канала (end-point) в каждом из положений. Выполняется до тех пор, пока надпись не засветится голубым. Переключая тумблер, можно в соответствующих режимах записывать ориентацию полета.
Чем отличаются режимы КурсЛок и ИКО ХоумЛок?Реальное направление полета в данном режиме будет идентично записанному направлению «Вперед» при любых обстоятельствах и вне зависимости от направлений носа коптера. Светодиод оповестит о включенном режиме медленным морганием.
Направление полета при наклонах стика тангажа вперед будет направлено строго от Точки Взлета. При этом, куда смотрит нос коптера не имеет никакого значения. Также коптер поменяет направление и при наклонах стика тангажа назад. Светодиод LED оповестит медленным морганием.
Режим активируется при возврате к Точке Взлета. Он отключится при достижении коптером зоны 10 метров и на расстоянии более 10 метров от Точки Взлета.
Почему коптер не набирает высоту при низком заряде аккумулятора? Что происходит, если точка висения сильно сместилась вверх от позиции 50% газа?
Во время срабатывания Второго уровня Защиты включается светодиод LED. Одновременно, центральная точка стика газа перемещается в позицию 90% расхода канала. Это происходит для того, чтобы исключить быстрый набор высоты. Пилоту необходимо срочно выполнить посадку аппарата. В противном случае устройство может упасть и разбиться. Если центральная точка стика газа перемещается в 90% расхода канала, управление происходит по каналам Крена (Roll), Тангажа (Pitch), и Рысканья (Yaw), также он чувствителен к перемещениям стика Газа.
Режимы отключения двигателей и их отличияв) Стик Газа ниже 10%, и после посадки прошло не менее 3 секунд.
г) Коптер имеет угол наклона выше 70 градусов к горизонту, а стик газа опустился ниже 10%. Как правильно откалибровать передатчик?
Движения слайдеров на шкалах после калибровки должны повторять движения стиков и соответствовать следующим параметрам:
(Т) Throttle или ГАЗ: при движении слайдера влево – коптер опускается, при движении вправо – поднимается.
(R) Rudder (Рысканье): если слайдер выполняет движения влево – коптер поворачивает нос в ту же сторону, если слайдер движется в другом направлении – коптер движет нос аналогично.
(E) Elevator (Тангаж): при движении слайдера влево – коптер совершает движения назад, при движении слайдера вправо –вперед.
(A) Aileron (Крен): Если слайдер станет двигаться влево – коптер будет кренится в ту же сторону, при движении слайдера вправо — аналогично.
Тангаж (Pitch)- действие, при котором, наклоняя стик вперед, вперед движется и коптер. При наклоне стика назад, коптер летит назад соответственно.
Крен (Roll). При наклоне стика вправо, коптер кренится в ту же сторону. Аналогично при наклоне стика влево, устройство станет двигаться также влево.
Рысканье (Yaw) – действие, при котором при наклоне стика вправо, коптер движет нос аналогично. А при наклоне влево – влево.
Как разместить приемник GPS?Модуль GPS необходимо разместить в удобном для Вас месте, исключать близкое расположение излучающих устройств или двигателей. Лучшим решением будет штанга, место, которое находится выше плоскости вращения двигателей. Тогда магнитные поля не смогут влиять на магнитометр, который расположен в корпусе GPS. После установки на раму оборудования: камеры, аккумуляторов, OSD, и тому подобное необходимо выполнить балансировку оборудования, чтобы ЦТ (Центр Тяжести) располагался четко в центральной точке рамы. После размещения модуля GPS и балансирования оборудования необходимо измерить расстояния от центра датчика GPS до ЦТ рамы. Полученные результаты ввести в соответствующие поля Assistans. Черная точка на рисунке характеризует модуль GPS, белая точка с черной обводкой — ЦТ платформы. Измеряется расстояние в сантиметрах. Размещение обозначается следующим образом: — Расстояния вводятся со знаком «минус», если модуль GPS установлен позади, слева или выше ЦТ по соответствующей оси (зеленые линии). К примеру, X= -2, Y= -6, Z= -5. — Расстояние имеет положительное значение если модуль GPS установлен впереди, справа или ниже ЦТ по соответствующей оси (красные линии). В качестве примера — X= 3, Y= 5, Z= 2. От двигателя до модуля GPS минимальное расстояние составляет 10 см! Логотип DJI должен смотреть ввысь, а стрелка на корпусе модуля GPS б ориентироваться строго вперед по направлению полета! Внимание! Если место размещения модуля GPS указано неверно, могут появиться осцилляции (раскачивания) и платформы после взлета будет вести себя непредсказуемо. Гарантировать точность удержания позиции в режиме GPS невозможно!
Запуск двигателейВыполняется при активации системы, использованием любой комбинации стиков на передатчике из возможных четырех. При этом оба стика могут быть направлены:
Действие выполняется во вкладке Motor Mixer. Оптимальным является среднее положение Recommand, но при активации запуска двигателей и наличии двигателей с высоким KV, платформа может начать взлет. И посадка устройства станет проблематичной. Рекомендуется уменьшить холостой ход. Если двигатели имеют низкий KV, при активации двигателей, они не будут вращаться. Рекомендуется увеличить значение холостого хода.
О чем свидетельствует индикация светодиода?Индикации Naza взята из жизни. Красный сигнал – остановка, желтый – выполнение действий, зеленый – разрешение движения. Если полеты запланированы на открытой территории, рекомендуется включить режим GPS и получить сигналы от спутника при первом подключении аккумулятора. Это займет минимум времени, но при этом платформа вернется на точку взлета, а не улетит к месту крайнего полета при любых условиях.
Индикатор аккумулятора после подключения дает последовательные сигналы красного – желтого — зеленого цвета. Это сигнализирует о внутренней диагностике и определении устройств на CAN шине.
GPS = зеленые вспышки
IOS = (это режимы HomeLock и CurseLock) – сигналы зеленого и желтого цвета, идущие друг за другом
Если модуль GPS подключен в этих же режимах индикация станет следующей:
Тройной красный сигнал = обнаружено до 5-ти сигналов со спутников
Двойной красный сигнал = обнаружено до 6-ти сигналов
Одинарный красный сигнал = обнаружено до 7-ми спутников
Удержание в точке, при такой индикации будет плохим, высока вероятность дрейфа.
Если красных сигналов нет, значит обнаружено более 8-ми сигналов со спутников и удержание в точке будет достаточным.
В любом из режимов длительная красная вспышка обозначает об ошибках стабилизации. Следует зависнуть, чтобы сбросить имеющиеся ошибки и исключить резкие перемещения платформы.
В режимах GPS (зеленые) и Attitude (желтые) перед каждым стартом двигателей будет производиться индикация:
Одиночный сигнал свидетельствует, что все стики управления, кроме газа, располагаются в центре.
Двойное оповещение сообщает, что все стики управления, кроме газа, наоборот располагаются вне центра.
Когда двигатели запущены, стик газа переведен в положение более чем 10%, возможно появление сигнализаций с идентичной трактовкой.
В режимах CurseLock и HomeLock (последовательная вспышка зеленым и желтым) будет выводиться дополнительная индикация перед запуском двигателей:
Последовательность желтый — зеленый обозначает, что все стики управления, кроме газа, в данный момент расположены в центре.
Последовательность желтый – зеленый – зеленый сигнализирует о том, что все стики, кроме газа находятся вне центра.
Когда двигатели запущены, стик газа переведен в положение более чем 10%, возможно появление сигнализаций с идентичной трактовкой.
Если аппарат выдает частые желтые вспышки — потерян сигнал управления.
Аналогичные вспышки красного цвета свидетельствуют о низком напряжении на аккумуляторе и прочие ошибки.
Процесс калибровки компаса?Если конфигурация коптера изменяется или перемещается точка крепления на раме GPS модуля необходимо вторично откалибровать компас
Не выполняйте процедуру вблизи крупных металлических сооружений, на автомобильных стоянках, на земле или под землей. Во время калибровки не носите с собой, и не используйте электронные приборы.
Начать калибровку необходимо переключением тумблера из режима GPS в режим Manual, причем сделать это нужно от 6-ти до 10-ти раз. Учтите: переключение из «GPS в Manual» и обратно = принимается за одно действие! Светодиод полетного контроллера сигнализирует о выполнении задач постоянным желтым цветом. Начинайте вращать коптер в горизонтальном положении, пока не появится зеленый цвет светодиода. Затем проделайте аналогичные действия в в вертикальной плоскости, зеленый сигнал должен погаснуть. Об успешном выполнении калибровки свидетельствует отсутствие индикации. В случае сбоя появится пульсирующий красный сигнал. В таком случае калибровку необходимо выполнить снова и лучше сделать это в другом месте.
Исключительной точности вращения: параллельно или перпендикулярно устройство не требует. Выдержать угол в 45 градусов между плоскостями вполне достаточно.
Почему коптер летает по спирали и не удерживается в точке?Необходимо проверить настройку, а также состояние включения режима «GPS» в программе Assistans. Расстояния между ЦТ платформы и модули GPS должны быть указаны верно. Кабель от модуля GPS желательно перепроложите как можно дальше от передатчиков видео, силовых проводов, а также датчиков потребления энергии систем телеметрии. Можно выполнить повторную калибровку магнитометра.
Настройка переключателя режимов?В меню передатчика, разделе регулировки endpoints канала, есть переключение режимов полета. Необходимо сместить уровни, чтобы надписи Attitude и Manual приобрели синий окрас. В Assistans 1.6, существует три положения настройки тумблера: GPS, Attitude и Manual. Если модуль GPS подключен, будет активироваться первый режим, а платформа удерживаться в точке с использованием сигналов со спутников GPS. Если модуль GPS отключен контроллер Naza без удержания в точке переключится в режим Attitude. Функции, «возврат на точку старта», «НоумЛок», «удержание в точке» и «КурсЛок» работают исключительно в положении «GPS». при этом модуль GPS должен быть подключен к контроллеру Naza.
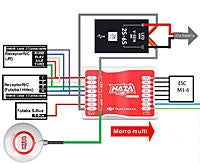
Подключение приемника?Если комплектный приемник поддерживает шину S.Bus, а система радиоуправления произведена Futaba, подключение необходимо выполнить согласно инструкции. В комплекте поставки есть один из кабелей с разъемами. Необходим всего один кабель, именно по нему передаются все каналы управления. в этом и весь смысл системы S.Bus. В программе Assistans выберите опцию Receiver Type – «D-Bus».
Если у вас в руках продукт другого производителя, необходимо соединить, входящие в комплект поставки NAZA кабелями с разъемами, контроллер и приемник. При этом на каждый канал использовать один кабель.
Как изменить направление вращения и подключить к двигателям регуляторы?
Безколлектороные регуляторы имеют три провода управления и питания двигателями. Если нельзя сменить направление вращения программированием регулятора, нужно просто два любых разъема поменять местами.
Подключение регуляторовЖелательно изолировать или полностью вытащить средний провод из разъема регулятора, чаще всего он красного цвета. Данный провод питает приемник и по нему подводится питание +5В. В NAZA контроллер питается от отдельного BEC, поэтому в данной процедуре необходимости нет. Отключать провода «земля»: черного или коричневого цвета необязательно. Если у Вас NAZA KIT, то в комплекте к нему идут регуляторы белого цвета от DJIESC 30A OPTO, и выполнять данные процедуры не требуется. Аналогично если в наличии регуляторы другого производителя с опторазвязкой по питанию. Тогда выполнять действия, указанные выше не требуется.
Виды регуляторов, с которыми работает NAZA?Лучшими компаньонами являются фирменные регуляторы от DJI Innovatoins, при этом и другие модели будут достойно работать. Можно подключить любые хоббийные регуляторы, которые имеют стандартную или модифицированную прошивку. В качестве исключений регуляторы I2C и UltraPWM. Данные устройства созданы для других типов контроллеров, у них иной интерфейс и диапазон газа.
Почему светодиод стал мигать оранжевым?Причин может быть несколько: выключен передатчик, отключен приемник или не выполнена конфигурация переключателя режимов работы контроллера (в программе Assistans).
Зависимость поведения коптера от настроек GAIN?Basic Gain — общая чувствительность или базовая составляющая, от которой зависит качество управляемости устройством. Чем выше показатель, тем активнее отклик на действия ручек передатчика. Vertical Gain — характеризует чувствительность барометра. Чем выше показатель, тем резче и быстрей устройство удерживает высоту. Attitude Gain — плавность выравнивания. Чем выше показатель, тем резче и активней процесс выравнивания. Чем ниже, тем его действия вальяжней и плавней. Данные параметры регулируются при помощи передатчика. Нужно только назначить на 6 и 7 каналы соответствующие Gain.
Варианты ошибок, которые отображаются AssistansCFG-ERR8 — Не правильная калибровка датчика или ошибочная конфигурация.
CFG-ERR — Ошибочная конфигурация. Ассистанс и версии прошивки не совпадают. Некачественная калибровка передатчика, перекалибруйте его и перезапустите систему.
VOL-LOW [4] — Слабый заряд аккумулятора.
SN-ERR — Если не совпадает серийный номер, необходимо обратиться к дилеру или в саппорт.
VOL-LOW[6] — Недостаточный заряд батареи.
IMU-ERR — IMU ERROR, обратитесь в саппорт или к дилеру DJI.
X1-ERR — Не работает вывод, нет сигнала передатчика или ошибка определения переключателя.
X2-ERR — Не работает вывод, нет сигнала передатчика или ошибка определения переключателя.
PMU-ERR — Проблемы с соединением аккумулятора, полетного контроллера Наза или PMU.
RX-ERR — Неправильно выбран тип сигнала, который идет от приемника. Нужно перезапустить контроллер.
COMPASS-ERR — проблемы с компасом, нужно перезапустить контроллер. При повторении ошибки, обратитесь в саппорт DJI или к дилеру.
ERROR [25] — Произошел сбой датчиков IMU при инициализации, возможно, имела место авария, initialization failure, обратитесь в саппорт DJI или к дилеру.
ERROR [26] — Требуется Advanced калибровка.
ERROR [27] — Присутствуют сильные электромагнитные помехи или не откалиброван GPS. Измените место и перекалибруйте компас.
Почему не запускаются двигатели?Причин может быть несколько: отсутствие питание, полярность, неправильная установка модели на передатчике и т.д. Следует проверить «забинден» ли приемник, выполнить мониторинг Endpoints в установках передатчика. При активации «расходов» канала или микшировании, стик газа располагается внизу, при этом на приемник передаются данные об уменьшенном диапазоне.
За основу статьи взят faq naza на сайте flydrones.ru